Machine Learning
Data-driven approaches to design intelligent algorithms.
MERL has a long history of research activity in machine learning, including the development of various boosting algorithms and contributing to the theory and practice of highly scalable collaborative filtering. Our recent work has focused on deep learning and reinforcement learning, with application to a wide range of applications including automotive, robotics, factory automation, transportation, as well as building and home systems.
Quick Links
-
Researchers

Toshiaki
Koike-Akino
Ye
Wang

Jonathan
Le Roux

Gordon
Wichern

Anoop
Cherian

Tim K.
Marks

Pu
(Perry)
Wang
Michael J.
Jones

Christopher R.
Laughman

Stefano
Di Cairano

Kieran
Parsons

Jing
Liu

Philip V.
Orlik

Suhas
Lohit

Daniel N.
Nikovski

Chiori
Hori

Bingnan
Wang

Yebin
Wang

Yoshiki
Masuyama

Matthew
Brand

Hassan
Mansour

Kuan-Chuan
Peng

Petros T.
Boufounos

Moitreya
Chatterjee

Abraham P.
Vinod

Pedro
Miraldo

Arvind
Raghunathan

Vedang M.
Deshpande

Jianlin
Guo

Siddarth
Jain

Saviz
Mowlavi

Hongtao
Qiao

Scott A.
Bortoff

Radu
Corcodel
William S.
Yerazunis

Christoph
Boeddeker

Chungwei
Lin

Dehong
Liu

Hongbo
Sun

Joshua
Rapp

Alexander
Schperberg

Nobuyuki
Yoshikawa

Julius
Richter

Wael H.
Ali

Takahiro
Edo

Yanting
Ma

Lalit
Manam
Zhaolin
Ren

Anthony
Vetro

Jinyun
Zhang

Purnanand
Elango

Abraham
Goldsmith

Kaen
Kogashi

Kei
Suzuki

Avishai
Weiss

Kenji
Inomata
-
Awards
-
AWARD MERL Team Wins DCASE 2026 Challenge on Anomalous Sound Detection for Machine Condition Monitoring Date: June 30, 2026
Awarded to: Takuya Fujimura, Gordon Wichern, Yoshiki Masuyama, Christoph Boeddeker, Kohei Saijo, Julius Richter, Takahiro Edo, and Jonathan Le Roux
MERL Contacts: Christoph Boeddeker; Takahiro Edo; Jonathan Le Roux; Yoshiki Masuyama; Julius Richter; Gordon Wichern
Research Areas: Artificial Intelligence, Machine Learning, Signal Processing, Speech & AudioBrief- MERL's Speech & Audio team ranked 1st out of 51 teams in the DCASE 2026 Challenge’s Task 2, “Noise-aware Unsupervised Anomalous Sound Detection for Machine Condition Monitoring.” The team was led by MERL intern Takuya Fujimura, and also included Gordon Wichern, Yoshiki Masuyama, Christoph Boeddeker, Kohei Saijo, Julius Richter, Takahiro Edo, and Jonathan Le Roux.
The IEEE AASP Challenge on Detection and Classification of Acoustic Scenes and Events (DCASE Challenge), started in 2013, has been organized yearly since 2016, and gathers challenges on multiple tasks related to the detection, analysis, and generation of sound events. This year, the DCASE 2026 Challenge received 421 submissions from 135 teams across seven tasks.
The MERL team won Task 2, Noise-aware Unsupervised Anomalous Sound Detection for Machine Condition Monitoring, which aims at building noise-robust systems for automatically detecting machine failure via microphones when only normal machine operating data is available for system development. Task 2 was by far the most popular out of the 7 DCASE 2026 tasks, with 51 teams submitting 168 entries. The MERL team's system was built around MERL’s recently proposed paradigm of noise-aware self-supervised learning, which extracts noise robust features leveraging two-channel recordings, in which one microphone is used to capture noise. Anomaly detection is then performed in the extracted denoised feature space using advanced score normalization. The team's best submission obtained a composite score of 70.24% on five evaluation machines, largely outperforming the 2nd best team's 65.45%.
MERL also participated in Task 4, Spatial Semantic Segmentation of Sound Scenes (S5) and placed 3rd out of 10 teams in separation performance. Our cascaded system consists of universal sound separation with source counting, source classification, and class-aware refinement, where the separation and refinement modules are built upon MERL's TF-Locoformer separation technology. Notably, the team's best submission obtained a label prediction accuracy of 76.92% on the evaluation set, largely outperforming the 2nd best team's 65.54%.
- MERL's Speech & Audio team ranked 1st out of 51 teams in the DCASE 2026 Challenge’s Task 2, “Noise-aware Unsupervised Anomalous Sound Detection for Machine Condition Monitoring.” The team was led by MERL intern Takuya Fujimura, and also included Gordon Wichern, Yoshiki Masuyama, Christoph Boeddeker, Kohei Saijo, Julius Richter, Takahiro Edo, and Jonathan Le Roux.
-
AWARD MERL team wins the Generative Data Augmentation of Room Acoustics (GenDARA) 2025 Challenge Date: April 7, 2025
Awarded to: Christopher Ick, Gordon Wichern, Yoshiki Masuyama, François G. Germain, and Jonathan Le Roux
MERL Contacts: Jonathan Le Roux; Yoshiki Masuyama; Gordon Wichern
Research Areas: Artificial Intelligence, Machine Learning, Speech & AudioBrief- MERL's Speech & Audio team ranked 1st out of 3 teams in the Generative Data Augmentation of Room Acoustics (GenDARA) 2025 Challenge, which focused on “generating room impulse responses (RIRs) to supplement a small set of measured examples and using the augmented data to train speaker distance estimation (SDE) models". The team was led by MERL intern Christopher Ick, and also included Gordon Wichern, Yoshiki Masuyama, François G. Germain, and Jonathan Le Roux.
The GenDARA Challenge was organized as part of the Generative Data Augmentation (GenDA) workshop at the 2025 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP 2025), and held on April 7, 2025 in Hyderabad, India. Yoshiki Masuyama presented the team's method, "Data Augmentation Using Neural Acoustic Fields With Retrieval-Augmented Pre-training".
The GenDARA challenge aims to promote the use of generative AI to synthesize RIRs from limited room data, as collecting or simulating RIR datasets at scale remains a significant challenge due to high costs and trade-offs between accuracy and computational efficiency. The challenge asked participants to first develop RIR generation systems capable of expanding a sparse set of labeled room impulse responses by generating RIRs at new source–receiver positions. They were then tasked with using this augmented dataset to train speaker distance estimation systems. Ranking was determined by the overall performance on the downstream SDE task. MERL’s approach to the GenDARA challenge centered on a geometry-aware neural acoustic field model that was first pre-trained on a large external RIR dataset to learn generalizable mappings from 3D room geometry to room impulse responses. For each challenge room, the model was then adapted or fine-tuned using the small number of provided RIRs, enabling high-fidelity generation of RIRs at unseen source–receiver locations. These augmented RIR sets were subsequently used to train the SDE system, improving speaker distance estimation by providing richer and more diverse acoustic training data.
- MERL's Speech & Audio team ranked 1st out of 3 teams in the Generative Data Augmentation of Room Acoustics (GenDARA) 2025 Challenge, which focused on “generating room impulse responses (RIRs) to supplement a small set of measured examples and using the augmented data to train speaker distance estimation (SDE) models". The team was led by MERL intern Christopher Ick, and also included Gordon Wichern, Yoshiki Masuyama, François G. Germain, and Jonathan Le Roux.
-
AWARD Mitsubishi Electric Team Wins Awards at GalFer Contest Date: June 23, 2025
Awarded to: Bingnan Wang, Tatsuya Yamamoto, Yusuke Sakamoto, Siyuan Sun, Toshiaki Koike-Akino, and Ye Wang
MERL Contacts: Toshiaki Koike-Akino; Bingnan Wang; Ye Wang
Research Areas: Machine Learning, Multi-Physical Modeling, OptimizationBrief- The MELSUR (Mitsubishi Electric SURrogate) team, consisting of a group of MERL and Mitsubishi Electric researchers, ranked first in two out of three categories in the GalFer Contest.
The GalFer (Galileo Ferraris) contest aims to compare the accuracy and efficiency of data-driven methodologies for the multi-physics simulation of traction electric machines. A total of 26 teams worldwide participated in the contest, which consists of three categories. The MELSUR team, including MERL staff Bingnan Wang, Toshiaki Koike-Akino, Ye Wang, MERL intern Siyuan Sun, Mitsubishi Electric researchers Tatsuya Yamamoto and Yusuke Sakamoto, ranked first for the category of "Novelty" and "Interpolation". The results were announced during an award ceremony at the COMPUMAG 2025 conference in Naples, Italy.
- The MELSUR (Mitsubishi Electric SURrogate) team, consisting of a group of MERL and Mitsubishi Electric researchers, ranked first in two out of three categories in the GalFer Contest.
See All Awards for Machine Learning -
-
News & Events
-
NEWS MERL Presents 4 Main Conference Papers and 6 Workshop Papers at ICML 2026 Date: July 6, 2026 - July 11, 2026
Where: COEX, Seoul, South Korea
MERL Contacts: Moitreya Chatterjee; Anoop Cherian; Stefano Di Cairano; Toshiaki Koike-Akino; Christopher R. Laughman; Jing Liu; Suhas Lohit; Kuan-Chuan Peng; Alexander Schperberg; Ye Wang; Gordon Wichern
Research Areas: Artificial Intelligence, Computer Vision, Machine Learning, Signal ProcessingBrief- MERL researchers are proud to present 4 main conference papers and 6 workshop papers at ICML 2026. ICML, taking place from July 6-11 in Seoul, South Korea, is a premier international conference in machine learning.
Main Conference Papers with MERL Authors:
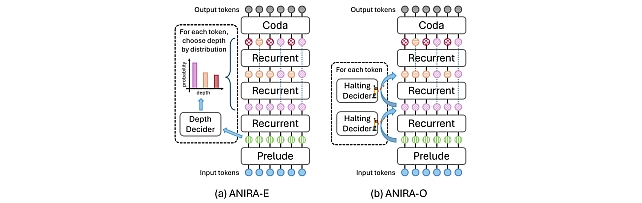
1. Understanding Dynamic Compute Allocation in Recurrent Transformers by Ibraheem Muhammad Moosa, Suhas Lohit, Ye Wang, Moitreya Chatterjee, and Wenpeng Yin.
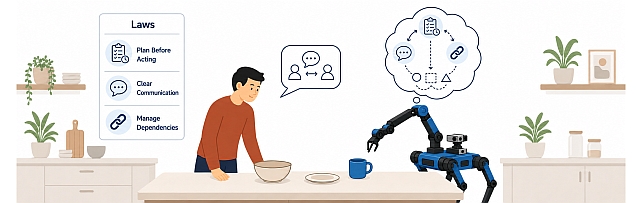
2. LLawCo: Learning Laws of Cooperation for Modeling Embodied Multi-Agent Behavior by Qinhong Zhou, Chuang Gan, and Anoop Cherian.
3. Memory-Distilled Selection for Noise-Robust Anomaly Detection by Sirojbek Safarov, Jaewoo Park, Yoon G. Jung, Kuan-Chuan Peng, Wonchul Kim, Seongdeok Bang, and Octavia Camps.
4. Partial Ring Scan: Revisiting Scan Order in Vision State Space Models by Yi-Kuan Hsieh, Kuan-Chuan Peng, Xin Li, Ming-Ching Chang, Yu-Chee Tseng, and Jun-Wei Hsieh.
Workshop Papers with MERL Authors:
1. WISE: Weighted Iterative Society-of-Experts for Multimodal Multi-Agent Debate with Probabilistic Consensus by Anoop Cherian, Suhas Lohit, and Kuan-Chuan Peng. (Workshop on Scalable Learning and Optimization for Efficient Multimodal AI Agents (SCALE))
2. MIRROR: Multisensory Implicit Rejection-sampled RObotic policy by Amisha Bhaskar, Pratap Tokekar, Stefano Di Cairano, and Alexander Schperberg. (Workshop on Structured Probabilistic Inference & Generative Modeling)
3. Reinforced Neural Processes: Memory-Efficient Time-Series Forecasting with a World-Feedback-Trained Memory Policy by Nibraas Khan, Gordon Wichern, and Christopher R. Laughman. (Workshop on Reinforcement Learning from World Feedback (RLxF))
4. Connecting Low-Rank Adapters and Policy Stability in GRPO Fine-Tuning by Antonin Rottman, Francesco Tonin, Yongtao Wu, Toshiaki Koike-Akino, and Volkan Cevher. (Workshop on Connecting Low-rank Representations in AI (CoLorAI))
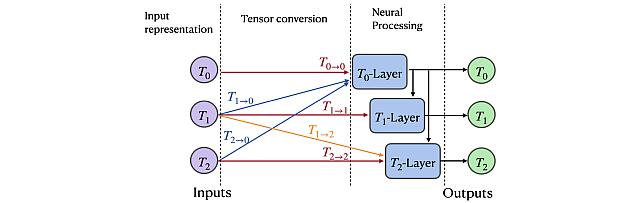
5. EinSort: Sorting is All We Need for Tensorizing LLM by Toshiaki Koike-Akino, Jing Liu, and Ye Wang. (Workshop on Connecting Low-rank Representations in AI (CoLorAI))
6. Temper and Tilt Lead to SLOP: Reward Hacking Mitigation with Inference-Time Alignment by Ye Wang, and Jing Liu, and Toshiaki Koike-Akino. (Workshop on Agents in the Wild: Safety, Security, and Beyond)
- MERL researchers are proud to present 4 main conference papers and 6 workshop papers at ICML 2026. ICML, taking place from July 6-11 in Seoul, South Korea, is a premier international conference in machine learning.
-
NEWS MERL researchers present 9 papers at IEEE ICRA 2026 Date: June 1, 2026 - June 5, 2026
Where: Vienna, Austria
MERL Contacts: Radu Corcodel; Stefano Di Cairano; Purnanand Elango; Siddarth Jain; Alexander Schperberg; Kento Tomita
Research Areas: Artificial Intelligence, Computer Vision, Control, Dynamical Systems, Machine Learning, Optimization, RoboticsBrief- MERL researchers presented nine papers at the recently concluded IEEE International Conference on Robotics and Automation (ICRA) 2026 in Vienna, Austria. The papers covered a broad set of topics in robotics, including robot perception, visuo-tactile sensing, contact and pose estimation, manipulation, reinforcement learning, diffusion policies, loco-manipulation, contact-implicit trajectory optimization, legged locomotion, localization, and perception-aware planning.
IEEE ICRA is the flagship conference of the IEEE Robotics and Automation Society and the world’s largest and most comprehensive technical conference focused on research advances and the latest technological developments in robotics. The event attracts nearly 8,000 participants and receives more than 5,000 paper submissions.
- MERL researchers presented nine papers at the recently concluded IEEE International Conference on Robotics and Automation (ICRA) 2026 in Vienna, Austria. The papers covered a broad set of topics in robotics, including robot perception, visuo-tactile sensing, contact and pose estimation, manipulation, reinforcement learning, diffusion policies, loco-manipulation, contact-implicit trajectory optimization, legged locomotion, localization, and perception-aware planning.
See All News & Events for Machine Learning -
-
Research Highlights
-
LLawCo: Learning Laws of Cooperation for Modeling Embodied Multi-Agent Behavior -
Point4Cast: Streaming Dynamic Scene Reconstruction and Forecasting -
AssemblyBench: Physics-Aware Assembly of Complex Industrial Objects -
SLAM-MER: Revisiting Monocular SLAM with Spatio-Temporal Scene Modeling -
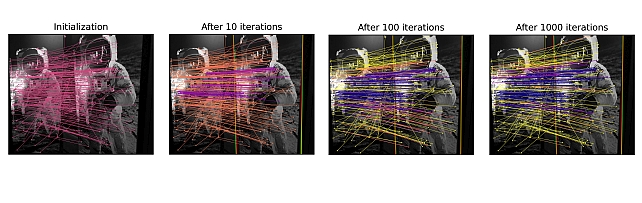
Parallel Rigidity Matters for Bundle Adjustment -
LLMPhy: Parameter-Identifiable Physical Reasoning Combining Large Language Models and Physics Engines -
SAC-GNC: SAmple Consensus for adaptive Graduated Non-Convexity -
PS-NeuS: A Probability-guided Sampler for Neural Implicit Surface Rendering -
Quantum AI Technology -
TI2V-Zero: Zero-Shot Image Conditioning for Text-to-Video Diffusion Models -
Gear-NeRF: Free-Viewpoint Rendering and Tracking with Motion-Aware Spatio-Temporal Sampling -
Private, Secure, and Reliable Artificial Intelligence -
Steered Diffusion -
Sustainable AI -
Edge-Assisted Internet of Vehicles for Smart Mobility -
Robust Machine Learning -
mmWave Beam-SNR Fingerprinting (mmBSF) -
Video Anomaly Detection -
Biosignal Processing for Human-Machine Interaction -
MERL Shopping Dataset -
Task-aware Unified Source Separation - Audio Examples
-
-
Internships
-
EA0237: Internship - Condition Monitoring and Fault Diagnosis
-
SA0302: Internship - Audio Processing for Moving Sounds
-
CA0310: Internship - Perception and Coordination for Heterogeneous Robots
See All Internships for Machine Learning -
-
Openings
-
MS0268: Research Scientist - Multiphysical Systems
-
CI0177: Postdoctoral Research Fellow - Agentic AI
See All Openings at MERL -
-
Recent Publications
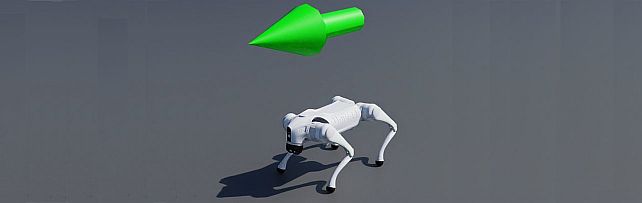
- , "MOBIUS: A Multi-Modal Bipedal Robot that can Walk, Crawl, Climb, and Roll", Robotics Science and Systems, July 2026.BibTeX TR2026-110 PDF Video
- @inproceedings{Schperberg2026jul,
- author = {Schperberg, Alexander and Tanaka, Yusuke and {Di Cairano}, Stefano and Hong, Dennis},
- title = {{MOBIUS: A Multi-Modal Bipedal Robot that can Walk, Crawl, Climb, and Roll}},
- booktitle = {Robotics Science and Systems},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-110}
- }
- , "Temper and Tilt Lead to SLOP: Reward Hacking Mitigation with Inference-Time Alignment", International Conference on Machine Learning (ICML) Workshop on Agents in the Wild: Safety, Security, and Beyond, July 2026.BibTeX TR2026-094 PDF Presentation
- @inproceedings{Wang2026jul,
- author = {{Wang, Ye and Liu, Jing and Koike-Akino, Toshiaki}},
- title = {{Temper and Tilt Lead to SLOP: Reward Hacking Mitigation with Inference-Time Alignment}},
- booktitle = {International Conference on Machine Learning (ICML) Workshop on Agents in the Wild: Safety, Security, and Beyond},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-094}
- }
- , "EinSort: Sorting is All We Need for Tensorizing LLM", International Conference on Machine Learning (ICML) Workshop, July 2026.BibTeX TR2026-093 PDF Presentation
- @inproceedings{Koike-Akino2026jul,
- author = {{Koike-Akino, Toshiaki and Liu, Jing and Wang, Ye}},
- title = {{EinSort: Sorting is All We Need for Tensorizing LLM}},
- booktitle = {International Conference on Machine Learning (ICML) Workshop},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-093}
- }
- , "Connecting Low-Rank Adapters and Policy Stability in GRPO Fine-Tuning", International Conference on Machine Learning (ICML) Workshop, July 2026.BibTeX TR2026-092 PDF
- @inproceedings{Rottman2026jul,
- author = {Rottman, Antonin and Tonin, Francesco and Wu, Yongtao and Koike-Akino, Toshiaki and Cevher, Volkan},
- title = {{Connecting Low-Rank Adapters and Policy Stability in GRPO Fine-Tuning}},
- booktitle = {International Conference on Machine Learning (ICML) Workshop},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-092}
- }
- , "Technical Report for MERL’s Real-TSE Challenge Submission," Tech. Rep. TR2026-112, Mitsubishi Electric Research Laboratories, July 2026.BibTeX TR2026-112 PDF
- @techreport{Klement2026jul2,
- author = {Klement, Dominik and Masuyama, Yoshiki and Boeddeker, Christoph and Saijo, Kohei and Richter, Julius and Wichern, Gordon and {Le Roux}, Jonathan},
- title = {{Technical Report for MERL’s Real-TSE Challenge Submission}},
- institution = {Real-TSE Challenge},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-112}
- }
- , "MIRROR: Multisensory Implicit Rejection-sampled RObotic policy", ICML 2026 Workshop on Structured Probabilistic Inference & Generative Modeling, July 2026.BibTeX TR2026-096 PDF
- @inproceedings{Bhaskar2026jul,
- author = {Bhaskar, Amisha and Tokekar, Pratap and {Di Cairano}, Stefano and Schperberg, Alexander},
- title = {{MIRROR: Multisensory Implicit Rejection-sampled RObotic policy}},
- booktitle = {ICML 2026 Workshop on Structured Probabilistic Inference \& Generative Modeling},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-096}
- }
- , "Partial Ring Scan: Revisiting Scan Order in Vision State Space Models", International Conference on Machine Learning (ICML), July 2026.BibTeX TR2026-091 PDF
- @inproceedings{Hsieh2026jul,
- author = {Hsieh, Yi-Kuan and Peng, Kuan-Chuan and Li, Xin and Chang, Ming-Ching and Tseng, Yu-Chee and Hsieh, Jun-Wei},
- title = {{Partial Ring Scan: Revisiting Scan Order in Vision State Space Models}},
- booktitle = {International Conference on Machine Learning (ICML)},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-091}
- }
- , "Reinforced Neural Processes: Memory-Efficient Time-Series Forecasting with a World-Feedback-Trained Memory Policy", ICML Workshop on Reinforcement Learning from World Feedback (RLxF), July 2026.BibTeX TR2026-095 PDF
- @inproceedings{Khan2026jul,
- author = {Khan, Nibraas and Wichern, Gordon and Laughman, Christopher R.},
- title = {{Reinforced Neural Processes: Memory-Efficient Time-Series Forecasting with a World-Feedback-Trained Memory Policy}},
- booktitle = {ICML Workshop on Reinforcement Learning from World Feedback (RLxF)},
- year = 2026,
- month = jul,
- url = {https://www.merl.com/publications/TR2026-095}
- }
- , "MOBIUS: A Multi-Modal Bipedal Robot that can Walk, Crawl, Climb, and Roll", Robotics Science and Systems, July 2026.
-
Videos
-
Software & Data Downloads
-
Understanding Dynamic Compute Allocation in Recurrent Transformers -
Learning Laws of Cooperation for Modeling Embodied Multi-Agent Behavior -
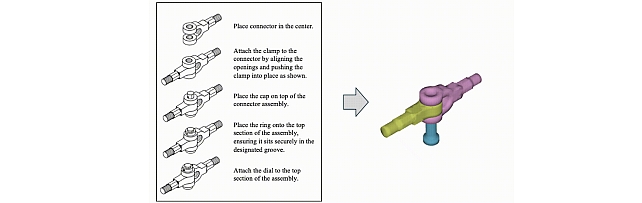
Physics-Aware Assembly of Complex Industrial Objects -
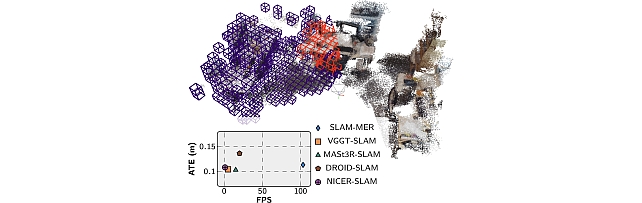
Mitsubishi Electric Research framework for visual SLAM -
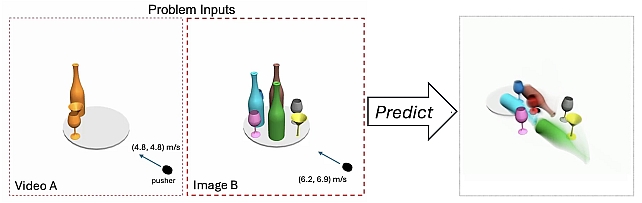
Parameter-Identifiable Physical Reasoning Combining Large Language Models and Physics Engines -
Directional Embedding Smoothing for Robust Vision Language Models -

MMHOI Dataset: Modeling Complex 3D Multi-Human Multi-Object Interactions -
Embracing Cacophony -
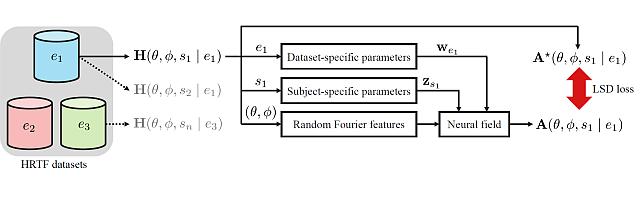
Subject- and Dataset-Aware Neural Field for HRTF Modeling -
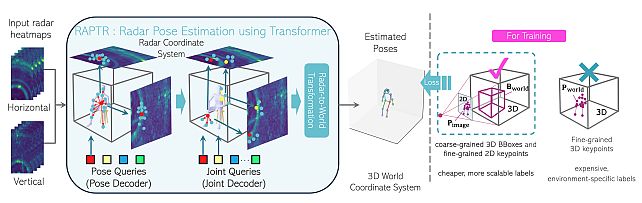
Radar-based 3D Pose Estimation using Transformer -
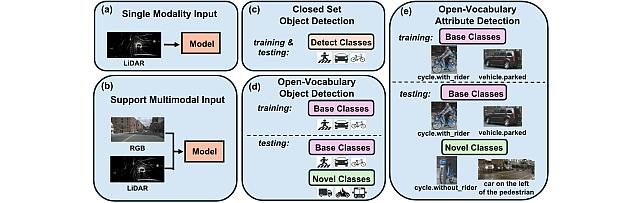
Open Vocabulary Attribute Detection Dataset -
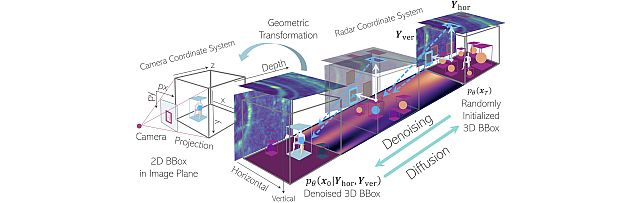
multi-view Radar object dEtection with 3D bounding boX diffusiOn -
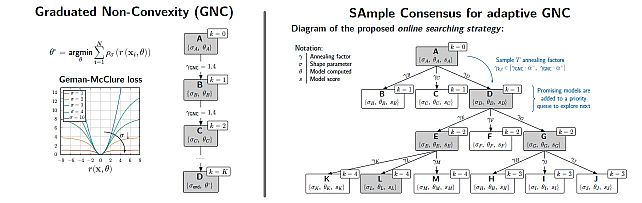
SAmple Consensus for Adaptive Graduated Non-Convexity -
Long-Tailed Online Anomaly Detection dataset -
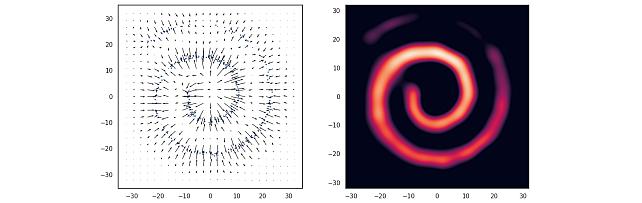
Group Representation Networks -
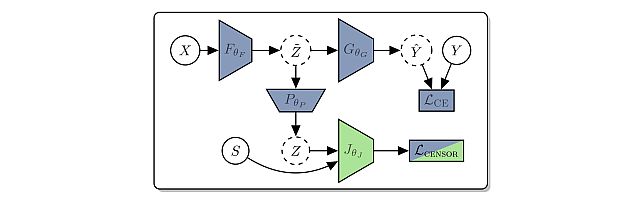
Stabilizing Subject Transfer in EEG Classification with Divergence Estimation -
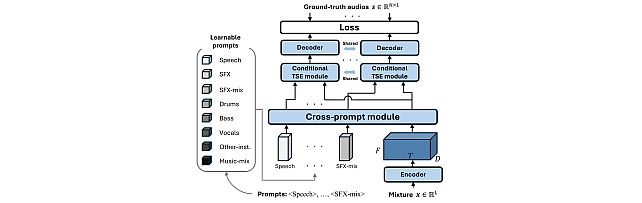
Task-Aware Unified Source Separation -
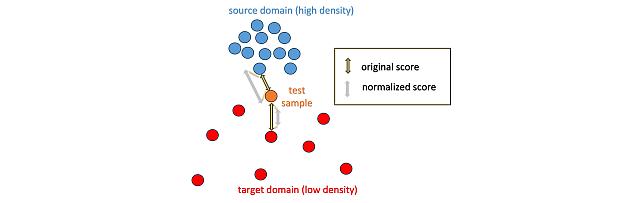
Local Density-Based Anomaly Score Normalization for Domain Generalization -
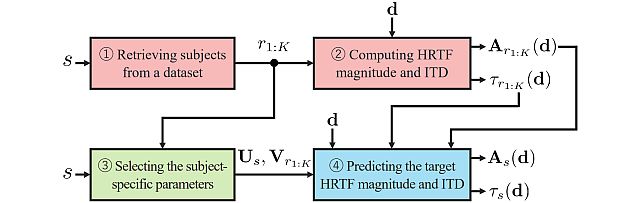
Retrieval-Augmented Neural Field for HRTF Upsampling and Personalization -

ComplexVAD Dataset -
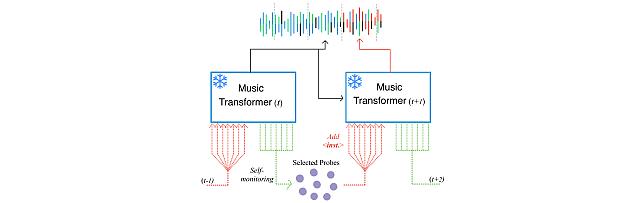
Self-Monitored Inference-Time INtervention for Generative Music Transformers -

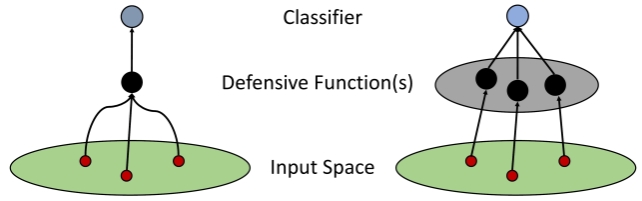
MEL-PETs Defense for LLM Privacy Challenge -

MEL-PETs Joint-Context Attack for LLM Privacy Challenge -
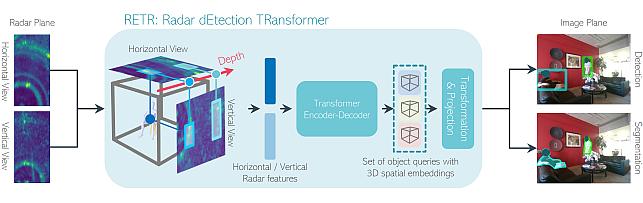
Radar dEtection TRansformer -

Millimeter-wave Multi-View Radar Dataset -

Zero-Shot Image Conditioning for Text-to-Video Diffusion Models -
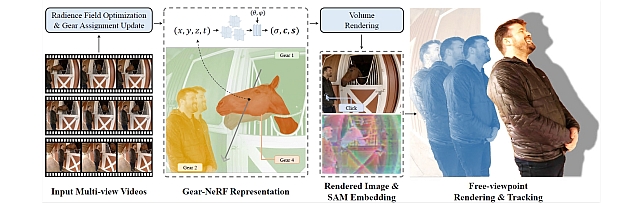
Gear Extensions of Neural Radiance Fields -
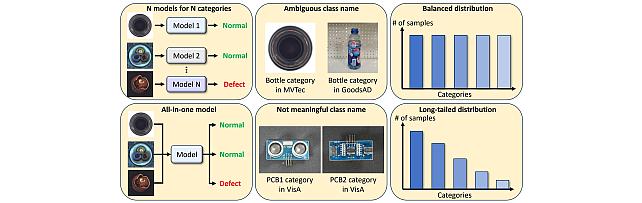
Long-Tailed Anomaly Detection Dataset -
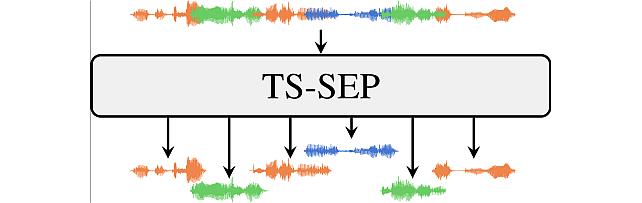
Target-Speaker SEParation -

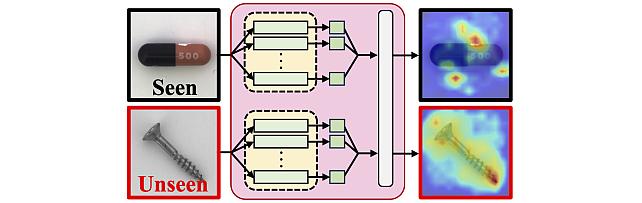
Pixel-Grounded Prototypical Part Networks -
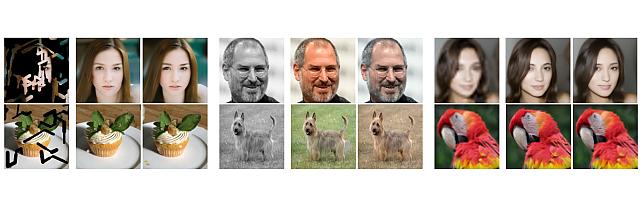
Steered Diffusion -
BAyesian Network for adaptive SAmple Consensus -
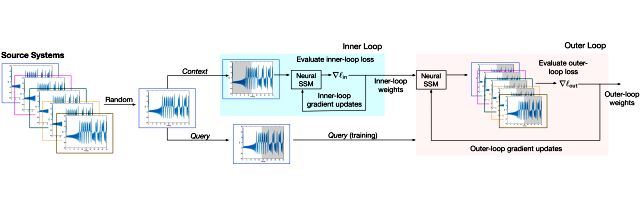
Meta-Learning State Space Models -
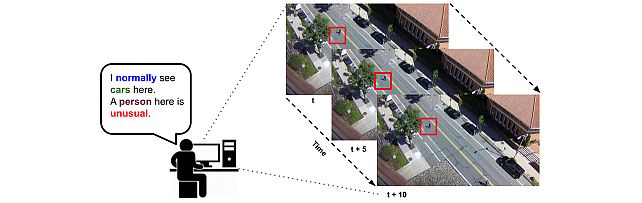
Explainable Video Anomaly Localization -
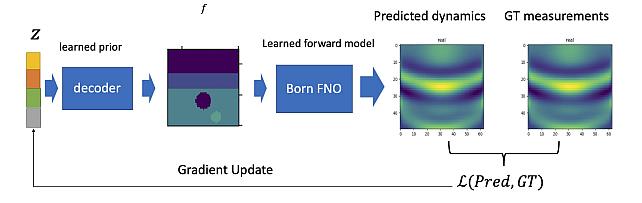
Learned Born Operator for Reflection Tomographic Imaging -
Simple Multimodal Algorithmic Reasoning Task Dataset -
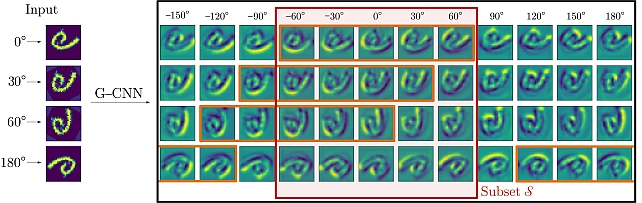
Partial Group Convolutional Neural Networks -
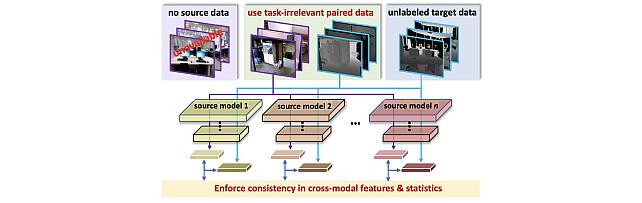
SOurce-free Cross-modal KnowledgE Transfer -
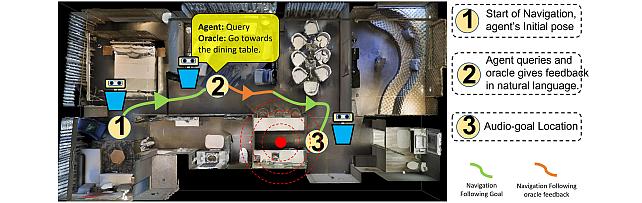
Audio-Visual-Language Embodied Navigation in 3D Environments -
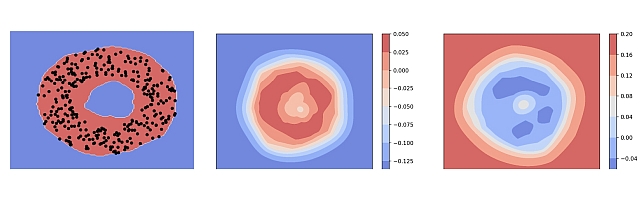
Nonparametric Score Estimators -
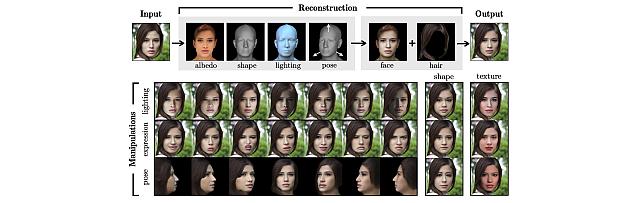
3D MOrphable STyleGAN -
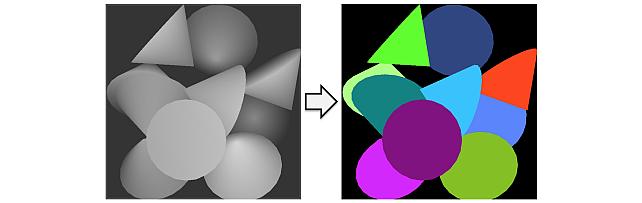
Instance Segmentation GAN -
Audio Visual Scene-Graph Segmentor -
Generalized One-class Discriminative Subspaces -
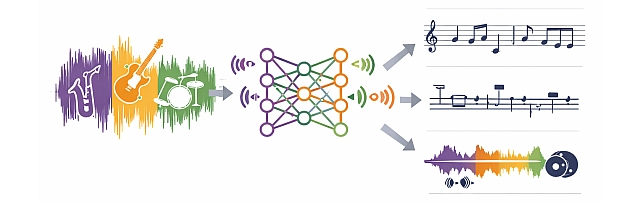
Hierarchical Musical Instrument Separation -
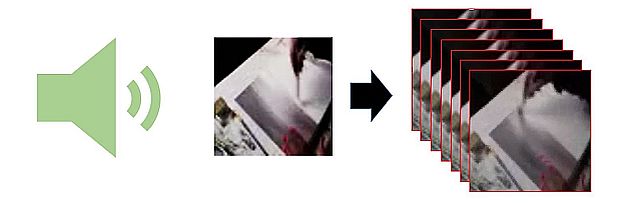
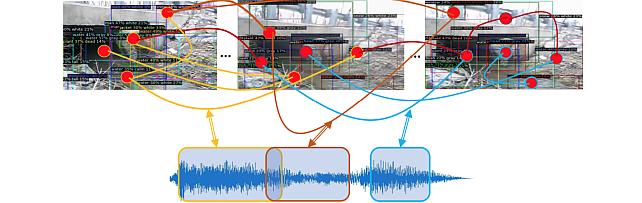
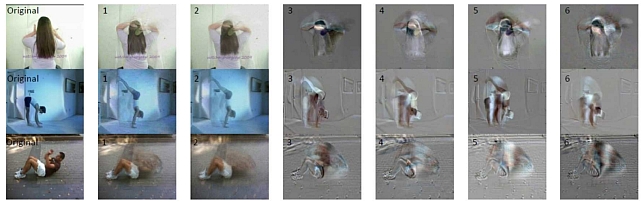
Generating Visual Dynamics from Sound and Context -

Adversarially-Contrastive Optimal Transport -
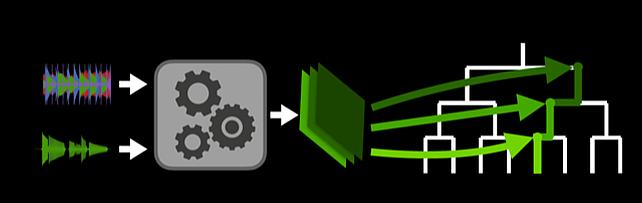
Online Feature Extractor Network -
MotionNet -
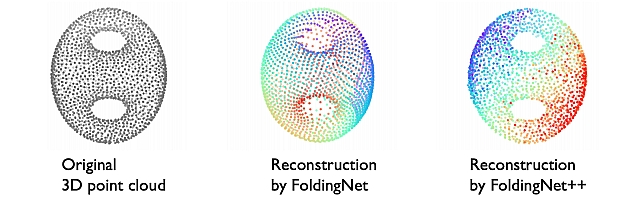
FoldingNet++ -
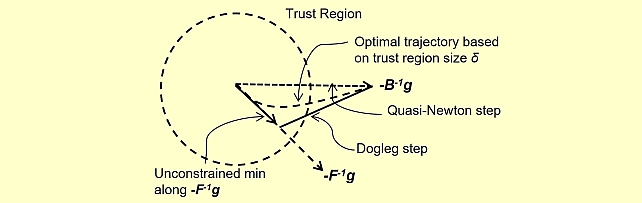
Quasi-Newton Trust Region Policy Optimization -
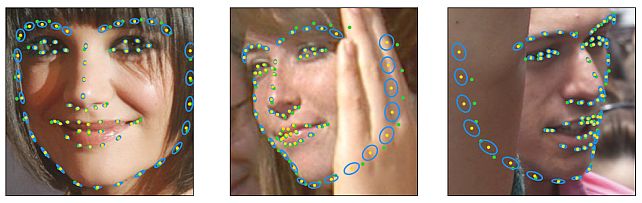
Landmarks’ Location, Uncertainty, and Visibility Likelihood -
Robust Iterative Data Estimation -
Gradient-based Nikaido-Isoda -
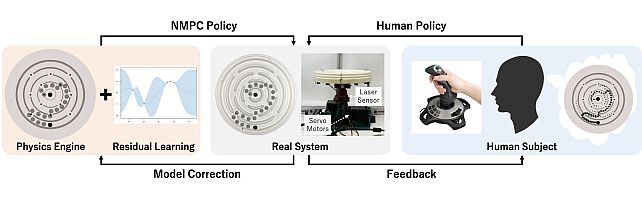
Circular Maze Environment -
Discriminative Subspace Pooling -
Kernel Correlation Network -
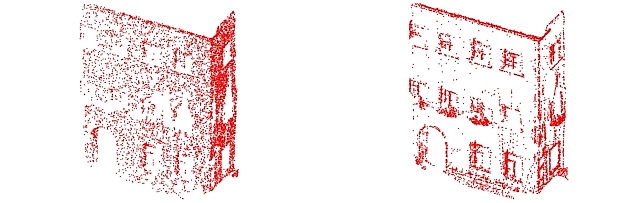
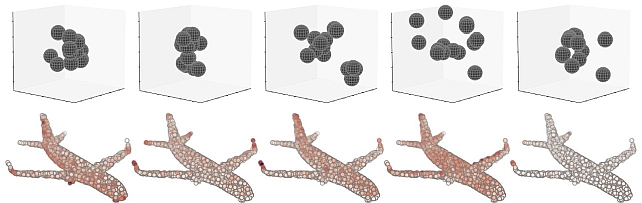
Fast Resampling on Point Clouds via Graphs -
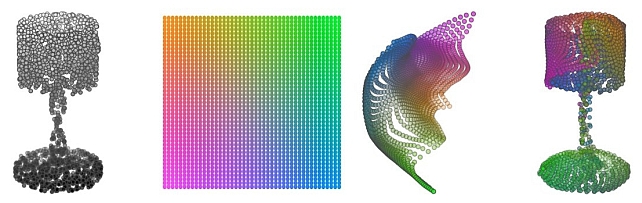
FoldingNet -
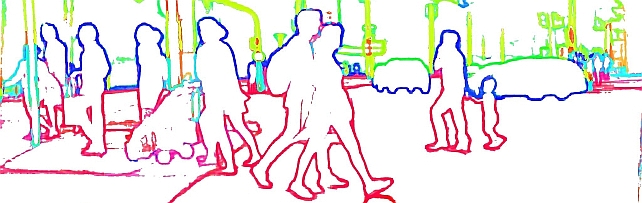
Deep Category-Aware Semantic Edge Detection -

MERL Shopping Dataset -
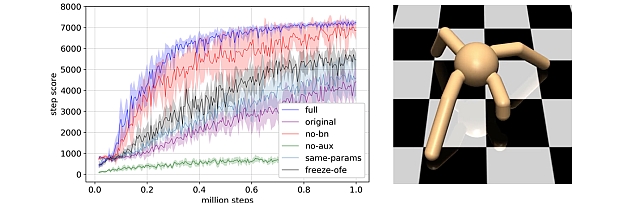
Generalization in Deep RL with a Robust Adaptation Module -
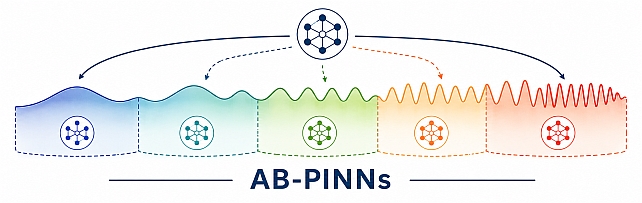
Adaptive-Basis Physics-Informed Neural Networks for Residual-Driven Domain Decomposition
-