Computational Sensing
Utilizing computation to improve sensing capabilities.
Our research in the area of computational sensing focuses on signal acquisition and design, signal modeling and reconstruction algorithms, including inverse problems, as well as array signal processing techniques.
Quick Links
-
Researchers

Petros T.
Boufounos

Hassan
Mansour

Pu
(Perry)
Wang
Dehong
Liu

Philip V.
Orlik

Toshiaki
Koike-Akino

Joshua
Rapp

Yanting
Ma

Kieran
Parsons

Saviz
Mowlavi
Ye
Wang

Anthony
Vetro

Wael H.
Ali

Jianlin
Guo

Radu
Corcodel

Vedang M.
Deshpande

Siddarth
Jain

Suhas
Lohit

Pedro
Miraldo

Kuan-Chuan
Peng

Abraham P.
Vinod

Yebin
Wang

Kenji
Inomata
Yue
Lu

Tsubasa
Terada
-
Awards
-
AWARD MERL’s Paper on Wi-Fi Sensing Earns Top 3% Paper Recognition at ICASSP 2023, Selected as a Best Student Paper Award Finalist Date: June 9, 2023
Awarded to: Cristian J. Vaca-Rubio, Pu Wang, Toshiaki Koike-Akino, Ye Wang, Petros Boufounos and Petar Popovski
MERL Contacts: Petros T. Boufounos; Toshiaki Koike-Akino; Pu (Perry) Wang; Ye Wang
Research Areas: Artificial Intelligence, Communications, Computational Sensing, Dynamical Systems, Machine Learning, Signal ProcessingBrief- A MERL Paper on Wi-Fi sensing was recognized as a Top 3% Paper among all 2709 accepted papers at the 2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2023). Co-authored by Cristian Vaca-Rubio and Petar Popovski from Aalborg University, Denmark, and MERL researchers Pu Wang, Toshiaki Koike-Akino, Ye Wang, and Petros Boufounos, the paper "MmWave Wi-Fi Trajectory Estimation with Continous-Time Neural Dynamic Learning" was also a Best Student Paper Award finalist.
Performed during Cristian’s stay at MERL first as a visiting Marie Skłodowska-Curie Fellow and then as a full-time intern in 2022, this work capitalizes on standards-compliant Wi-Fi signals to perform indoor localization and sensing. The paper uses a neural dynamic learning framework to address technical issues such as low sampling rate and irregular sampling intervals.
ICASSP, a flagship conference of the IEEE Signal Processing Society (SPS), was hosted on the Greek island of Rhodes from June 04 to June 10, 2023. ICASSP 2023 marked the largest ICASSP in history, boasting over 4000 participants and 6128 submitted papers, out of which 2709 were accepted.
- A MERL Paper on Wi-Fi sensing was recognized as a Top 3% Paper among all 2709 accepted papers at the 2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2023). Co-authored by Cristian Vaca-Rubio and Petar Popovski from Aalborg University, Denmark, and MERL researchers Pu Wang, Toshiaki Koike-Akino, Ye Wang, and Petros Boufounos, the paper "MmWave Wi-Fi Trajectory Estimation with Continous-Time Neural Dynamic Learning" was also a Best Student Paper Award finalist.
-
AWARD Joshua Rapp wins Best Dissertation Award from the IEEE Signal Processing Society Date: December 20, 2021
Awarded to: Joshua Rapp
MERL Contact: Joshua Rapp
Research Areas: Computational Sensing, Signal ProcessingBrief- Joshua Rapp has won the 2021 Best PhD Dissertation Award from the IEEE Signal Processing Society.
The award recognizes a PhD thesis completed on a signal processing subject within the past three years for its relevant work in signal processing while stimulating further research in the field.
Dr. Rapp completed his PhD at Boston University in 2020 with a thesis entitled "Probabilistic Modeling for Single-Photon Lidar." The dissertation tackles challenges of the acquisition and processing of 3D depth maps reconstructed from time-of-flight data captured one photon at a time.
The award will be presented at the 2022 IEEE International Conference on Image Processing (ICIP) in France.
- Joshua Rapp has won the 2021 Best PhD Dissertation Award from the IEEE Signal Processing Society.
-
AWARD Petros Boufounos Elevated to IEEE Fellow Date: January 1, 2022
Awarded to: Petros T. Boufounos
MERL Contact: Petros T. Boufounos
Research Areas: Computational Sensing, Signal ProcessingBrief- MERL’s Petros Boufounos has been elevated to IEEE Fellow, effective January 2022, for “contributions to compressed sensing.”
IEEE Fellow is the highest grade of membership of the IEEE. It honors members with an outstanding record of technical achievements, contributing importantly to the advancement or application of engineering, science and technology, and bringing significant value to society. Each year, following a rigorous evaluation procedure, the IEEE Fellow Committee recommends a select group of recipients for elevation to IEEE Fellow. Less than 0.1% of voting members are selected annually for this member grade elevation.
- MERL’s Petros Boufounos has been elevated to IEEE Fellow, effective January 2022, for “contributions to compressed sensing.”
See All Awards for Computational Sensing -
-
News & Events
-
NEWS Petros Boufounos elected Vice President–Conferences of the IEEE Signal Processing Society Date: June 24, 2026
MERL Contact: Petros T. Boufounos
Research Areas: Computational Sensing, Signal ProcessingBrief- MERL's Distinguished Research Scientist and IEEE Fellow Dr. Petros Boufounos has been elected Vice President–Conferences of the IEEE Signal Processing Society (SPS) for the 2027–2029 term. In this role, he will serve on the SPS Board of Governors and chair the SPS Conferences Board, overseeing the Society’s conferences, workshops, and other technical meeting activities.
-
EVENT MERL Contributes to ICASSP 2026 Date: Monday, May 4, 2026 - , May 8, 2026
Location: Barcelona, Spain
MERL Contacts: Wael H. Ali; Petros T. Boufounos; Chiori Hori; Jonathan Le Roux; Yanting Ma; Hassan Mansour; Yoshiki Masuyama; Joshua Rapp; Anthony Vetro; Pu (Perry) Wang; Gordon Wichern
Research Areas: Artificial Intelligence, Computational Sensing, Computer Vision, Machine Learning, Optimization, Signal Processing, Speech & AudioBrief- MERL has made numerous contributions to both the organization and technical program of ICASSP 2026, which is being held in Barcelona, Spain from May 4-8, 2026.
Sponsorship
MERL is proud to be a Silver Patron of the conference and will participate in the student job fair on Thursday, May 7. Please join this session to learn more about employment opportunities at MERL, including openings for research scientists, post-docs, and interns. MERL Distinguished Research Scientists Petros T. Boufounos and Jonathan Le Roux will also present a spotlight session on MERL’s research in signal processing on Tuesday, May 5 at 13:05. Finally, MERL will sponsor a photo booth on Thursday, May 7 and Friday, May 8, where ICASSP participants can take professional photos with friends and colleagues, which will be emailed to them.
MERL is also pleased to be the sponsor of two IEEE Awards that will be presented at the conference. We congratulate Prof. Nasir Ahmed, the recipient of the 2026 IEEE Fourier Award for Signal Processing, and Dr. Alex Acero, the recipient of the 2026 IEEE James L. Flanagan Speech and Audio Processing Award.
Technical Program
MERL is presenting 8 papers in the main conference on a wide range of topics including source separation, spatial audio, neural audio codecs, radar-based pose estimation, camera-based airflow sensing, radar array processing, and optimization. Another paper on neural speech codecs will be presented at the Low-Resource Audio Codec (LRAC) Satellite Workshop. MERL researchers will also present two articles published in IEEE Open Journal of Signal Processing (OJSP) on music source separation and head-related transfer function (HRTF) modeling. Finally, Speech and Audio Team members Yoshiki Masuyama and Jonathan Le Roux co-organized a Special Session on Neural Spatial Audio Processing, which will feature six oral presentations.
About ICASSP
ICASSP is the flagship conference of the IEEE Signal Processing Society, and the world's largest and most comprehensive technical conference focused on the research advances and latest technological development in signal and information processing. The event attracts more than 4000 participants each year.
- MERL has made numerous contributions to both the organization and technical program of ICASSP 2026, which is being held in Barcelona, Spain from May 4-8, 2026.
See All News & Events for Computational Sensing -
-
Research Highlights
-
Internships
See All Internships for Computational Sensing -
Openings
-
SA0297: Postdoctoral Research Fellow - AI for Science
-
ST0175: Postdoctoral Research Fellow - Quantum Technologies
See All Openings at MERL -
-
Recent Publications
- , "Waveforms in 6G and Beyond", IEEE Communications Standards Magazine, DOI: 10.1109/MCOMSTD.2026.3681093, Vol. 10, No. 2, pp. 96-97, June 2026.BibTeX TR2026-099 PDF
- @article{Yuan2026jun,
- author = {{Yuan, Weijie and Wang, Pu and Ahmadi, Hamed and Liu, Bryan}},
- title = {{Waveforms in 6G and Beyond}},
- journal = {IEEE Communications Standards Magazine},
- year = 2026,
- volume = 10,
- number = 2,
- pages = {96--97},
- month = jun,
- doi = {10.1109/MCOMSTD.2026.3681093},
- issn = {2471-2833},
- url = {https://www.merl.com/publications/TR2026-099}
- }
- , "Robust Current Fault Signature Extraction for Train Traction Motors", 2026 IEEE Transportation Electrification Conference & Expo, June 2026.BibTeX TR2026-080 PDF
- @inproceedings{Liu2026jun2,
- author = {Liu, Dehong and Iwawaki, Tomoyuki and Hirakida, Ken and Matsui, Yoshiki and Wang, Yebin},
- title = {{Robust Current Fault Signature Extraction for Train Traction Motors}},
- booktitle = {2026 IEEE Transportation Electrification Conference \& Expo},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-080}
- }
- , "Single View Camera-Based Dynamic Airflow Sensing", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), May 2026.BibTeX TR2026-038 PDF
- @inproceedings{Tandi2026may,
- author = {Tandi, Kevin and Ali, Wael H. and Rapp, Joshua and Mansour, Hassan},
- title = {{Single View Camera-Based Dynamic Airflow Sensing}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2026,
- month = may,
- url = {https://www.merl.com/publications/TR2026-038}
- }
- , "Heatmap-to-SMPL Multi-View Radar Transformer for Multi-Person 3D Pose Estimation", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), DOI: 10.1109/ICASSP55912.2026.11463668, May 2026.BibTeX TR2026-040 PDF
- @inproceedings{Kato2026may,
- author = {Kato, Sorachi and Wang, Pu and Fujihashi, Takuya and Markham, Andrew},
- title = {{Heatmap-to-SMPL Multi-View Radar Transformer for Multi-Person 3D Pose Estimation}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2026,
- month = may,
- publisher = {IEEE},
- doi = {10.1109/ICASSP55912.2026.11463668},
- issn = {2379-190X},
- isbn = {979-8-3315-6701-9},
- url = {https://www.merl.com/publications/TR2026-040}
- }
- , "Unambiguous Range Extension for1 Doppler Single-Photon Lidar", Optics Express, DOI: 10.1364/OE.592528, Vol. 34, No. 9, pp. 15933-15952, May 2026.BibTeX TR2026-050 PDF
- @article{Kitichotkul2026apr,
- author = {Kitichotkul, Ruangrawee and Rapp, Joshua and Ma, Yanting and Mansour, Hassan},
- title = {{Unambiguous range extension for Doppler single-photon lidar}},
- journal = {Optics Express},
- year = 2026,
- volume = 34,
- number = 9,
- pages = {15933--15952},
- month = apr,
- doi = {10.1364/OE.592528},
- url = {https://www.merl.com/publications/TR2026-050}
- }
- , "DUAL-REGULARIZED ITERATIVE ADAPTIVE APPROACH FOR DOA SPECTRUM RECONSTRUCTION IN LIMITED ANGLE SECTOR", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), May 2026.BibTeX TR2026-039 PDF
- @inproceedings{Takahashi2026may,
- author = {Takahashi, Ryuhei and Mansour, Hassan and Boufounos, Petros T.},
- title = {{DUAL-REGULARIZED ITERATIVE ADAPTIVE APPROACH FOR DOA SPECTRUM RECONSTRUCTION IN LIMITED ANGLE SECTOR}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2026,
- month = may,
- url = {https://www.merl.com/publications/TR2026-039}
- }
- , "ProxiCBO: A Consensus-based Method for Composite Optimization", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), DOI: 10.1109/ICASSP55912.2026.11464733, May 2026, pp. 946-950.BibTeX TR2026-041 PDF
- @inproceedings{Zhang2026may,
- author = {Zhang, Haoyu and Ma, Yanting and Kitichotkul, Ruangrawee and Rapp, Joshua and Boufounos, Petros T.},
- title = {{ProxiCBO: A Consensus-based Method for Composite Optimization}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2026,
- pages = {946--950},
- month = may,
- publisher = {IEEE},
- doi = {10.1109/ICASSP55912.2026.11464733},
- issn = {1520-6149},
- isbn = {979-8-3315-6702-6},
- url = {https://www.merl.com/publications/TR2026-041}
- }
- , "Velocity estimation with single-photon lidar", SPIE Conference on Advanced Photon Counting Techniques, Mark A. Itzler, Joshua C. Bienfang, K. Alex McIntosh, Eds., DOI: 10.1117/12.3097621, April 2026, vol. 14019, pp. 1401903.BibTeX TR2026-051 PDF
- @inproceedings{Rapp2026apr,
- author = {Rapp, Joshua and Kitichotkul, Ruangrawee and Ma, Yanting and Mansour, Hassan},
- title = {{Velocity estimation with single-photon lidar}},
- booktitle = {Advanced Photon Counting Techniques XX},
- year = 2026,
- editor = {Mark A. Itzler, Joshua C. Bienfang, K. Alex McIntosh},
- volume = 14019,
- pages = 1401903,
- month = apr,
- publisher = {SPIE},
- doi = {10.1117/12.3097621},
- url = {https://www.merl.com/publications/TR2026-051}
- }
- , "Waveforms in 6G and Beyond", IEEE Communications Standards Magazine, DOI: 10.1109/MCOMSTD.2026.3681093, Vol. 10, No. 2, pp. 96-97, June 2026.
-
Videos
-
Software & Data Downloads
-
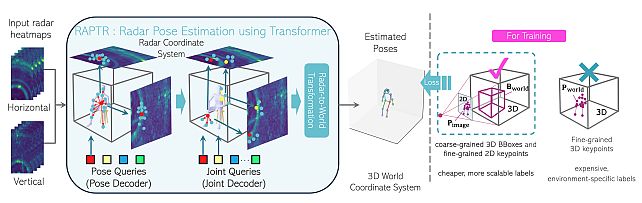
Radar-based 3D Pose Estimation using Transformer -
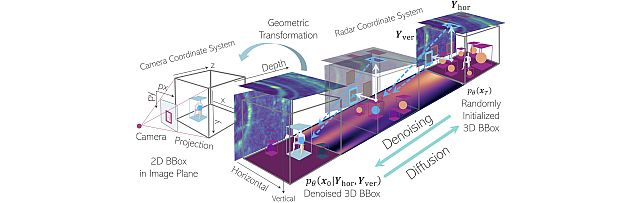
multi-view Radar object dEtection with 3D bounding boX diffusiOn -
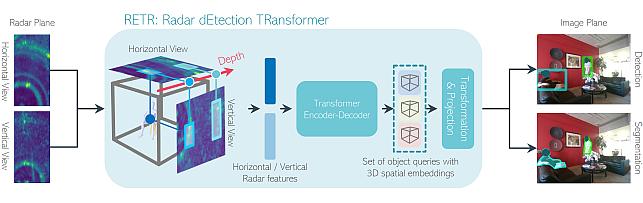
Radar dEtection TRansformer -

Millimeter-wave Multi-View Radar Dataset -
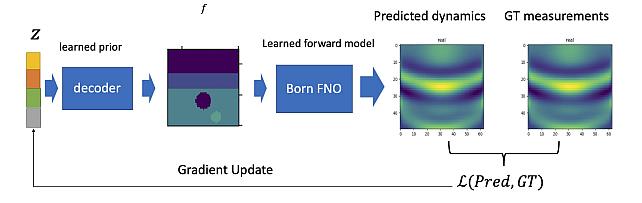
Learned Born Operator for Reflection Tomographic Imaging -
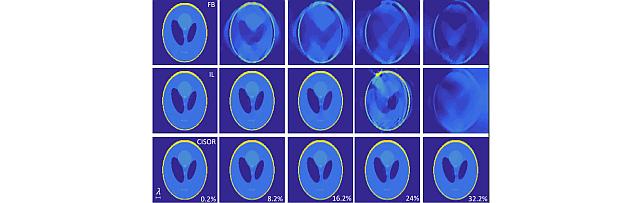
Convergent Inverse Scattering using Optimization and Regularization -
Generalization in Deep RL with a Robust Adaptation Module -
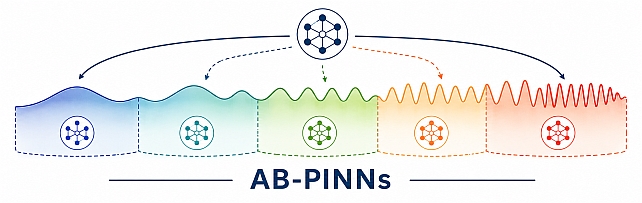
Adaptive-Basis Physics-Informed Neural Networks for Residual-Driven Domain Decomposition
-