Signal Processing
Acquisition and processing of information.
Our research in the area of signal processing encompasses a wide range of work in the areas of communications, sensing, estimation, localization, and speech and visual information processing. We explore novel approaches for signal acquisition and coding, methods to filter and recover signals in the presence of noise and other degrading factors, and techniques that infer meaning from the processed signals.
Quick Links
-
Researchers

Toshiaki
Koike-Akino

Philip V.
Orlik

Kieran
Parsons

Pu
(Perry)
Wang
Ye
Wang

Petros T.
Boufounos

Hassan
Mansour

Stefano
Di Cairano

Dehong
Liu

Jianlin
Guo

Bingnan
Wang

Yebin
Wang

Joshua
Rapp

Yanting
Ma

Matthew
Brand

Chungwei
Lin

Hongbo
Sun

Jinyun
Zhang

Suhas
Lohit

Tim K.
Marks

Wael H.
Ali

Saviz
Mowlavi

Anthony
Vetro

Avishai
Weiss

Vedang M.
Deshpande

Abraham
Goldsmith

Jonathan
Le Roux

Pedro
Miraldo

Abraham P.
Vinod
William S.
Yerazunis

Anoop
Cherian

Radu
Corcodel

Chiori
Hori

Huifang
Sun

Kenji
Inomata

Jing
Liu
-
Awards
-
AWARD MERL Team Wins DCASE 2026 Challenge on Anomalous Sound Detection for Machine Condition Monitoring Date: June 30, 2026
Awarded to: Takuya Fujimura, Gordon Wichern, Yoshiki Masuyama, Christoph Boeddeker, Kohei Saijo, Julius Richter, Takahiro Edo, and Jonathan Le Roux
MERL Contacts: Christoph Boeddeker; Takahiro Edo; Jonathan Le Roux; Yoshiki Masuyama; Julius Richter; Gordon Wichern
Research Areas: Artificial Intelligence, Machine Learning, Signal Processing, Speech & AudioBrief- MERL's Speech & Audio team ranked 1st out of 51 teams in the DCASE 2026 Challenge’s Task 2, “Noise-aware Unsupervised Anomalous Sound Detection for Machine Condition Monitoring.” The team was led by MERL intern Takuya Fujimura, and also included Gordon Wichern, Yoshiki Masuyama, Christoph Boeddeker, Kohei Saijo, Julius Richter, Takahiro Edo, and Jonathan Le Roux.
The IEEE AASP Challenge on Detection and Classification of Acoustic Scenes and Events (DCASE Challenge), started in 2013, has been organized yearly since 2016, and gathers challenges on multiple tasks related to the detection, analysis, and generation of sound events. This year, the DCASE 2026 Challenge received 421 submissions from 135 teams across seven tasks.
The MERL team won Task 2, Noise-aware Unsupervised Anomalous Sound Detection for Machine Condition Monitoring, which aims at building noise-robust systems for automatically detecting machine failure via microphones when only normal machine operating data is available for system development. Task 2 was by far the most popular out of the 7 DCASE 2026 tasks, with 51 teams submitting 168 entries. The MERL team's system was built around MERL’s recently proposed paradigm of noise-aware self-supervised learning, which extracts noise robust features leveraging two-channel recordings, in which one microphone is used to capture noise. Anomaly detection is then performed in the extracted denoised feature space using advanced score normalization. The team's best submission obtained a composite score of 70.24% on five evaluation machines, largely outperforming the 2nd best team's 65.45%.
MERL also participated in Task 4, Spatial Semantic Segmentation of Sound Scenes (S5) and placed 3rd out of 10 teams in separation performance. Our cascaded system consists of universal sound separation with source counting, source classification, and class-aware refinement, where the separation and refinement modules are built upon MERL's TF-Locoformer separation technology. Notably, the team's best submission obtained a label prediction accuracy of 76.92% on the evaluation set, largely outperforming the 2nd best team's 65.54%.
- MERL's Speech & Audio team ranked 1st out of 51 teams in the DCASE 2026 Challenge’s Task 2, “Noise-aware Unsupervised Anomalous Sound Detection for Machine Condition Monitoring.” The team was led by MERL intern Takuya Fujimura, and also included Gordon Wichern, Yoshiki Masuyama, Christoph Boeddeker, Kohei Saijo, Julius Richter, Takahiro Edo, and Jonathan Le Roux.
-
AWARD MERL intern and Researchers wins 2025 IEEE CCTA Best Student Paper Award Date: August 27, 2025
Awarded to: Yingjie Hu (Student, Intern), Karl Berntorp, Stefano Di Cairano (MERL Researchers)
MERL Contact: Stefano Di Cairano
Research Areas: Control, Dynamical Systems, Signal ProcessingBrief- MERL intern Yingjie Hu was recognized as the winner of the 2025 IEEE CCTA Best Student Paper Award for the paper "Optimal Measurement Projection in GNSS-RTK Factor Graph Optimization" written in collaboration with MERL Researchers Karl Berntorp and Stefano Di Cairano during the internship at MERL
The paper develops methods for measurement projections for reducing the computational burden of factor graph optimization algorithms in GNSS applications, thus enabling their use in real-time in a wider range of positioning applications.
The IEEE Conference on Control Technology and Application is the conference of the IEEE Control Systems Society focused on applications and technological advances of control systems
- MERL intern Yingjie Hu was recognized as the winner of the 2025 IEEE CCTA Best Student Paper Award for the paper "Optimal Measurement Projection in GNSS-RTK Factor Graph Optimization" written in collaboration with MERL Researchers Karl Berntorp and Stefano Di Cairano during the internship at MERL
-
AWARD Best paper award at PHMAP 2023 Date: September 14, 2023
Awarded to: Dehong Liu, Anantaram Varatharajan, and Abraham Goldsmith
MERL Contacts: Abraham Goldsmith; Dehong Liu
Research Areas: Electric Systems, Signal ProcessingBrief- MERL researchers Dehong Liu, Anantaram Varatharajan, and Abraham Goldsmith were awarded one of three best paper awards at Asia Pacific Conference of the Prognostics and Health Management Society 2023 (PHMAP23) held in Tokyo from September 11th to 14th, 2023, for their co-authored paper titled 'Extracting Broken-Rotor-Bar Fault Signature of Varying-Speed Induction Motors.'
PHMAP is a biennial international conference specialized in prognostics and health management. PHMAP23 attracted more than 300 attendees from worldwide and published more than 160 regular papers from academia and industry including aerospace, production, civil engineering, electronics, and so on.
- MERL researchers Dehong Liu, Anantaram Varatharajan, and Abraham Goldsmith were awarded one of three best paper awards at Asia Pacific Conference of the Prognostics and Health Management Society 2023 (PHMAP23) held in Tokyo from September 11th to 14th, 2023, for their co-authored paper titled 'Extracting Broken-Rotor-Bar Fault Signature of Varying-Speed Induction Motors.'
See All Awards for Signal Processing -
-
News & Events
-
NEWS MERL Presents 4 Main Conference Papers and 6 Workshop Papers at ICML 2026 Date: July 6, 2026 - July 11, 2026
Where: COEX, Seoul, South Korea
MERL Contacts: Moitreya Chatterjee; Anoop Cherian; Stefano Di Cairano; Toshiaki Koike-Akino; Christopher R. Laughman; Jing Liu; Suhas Lohit; Kuan-Chuan Peng; Alexander Schperberg; Ye Wang; Gordon Wichern
Research Areas: Artificial Intelligence, Computer Vision, Machine Learning, Signal ProcessingBrief- MERL researchers are proud to present 4 main conference papers and 6 workshop papers at ICML 2026. ICML, taking place from July 6-11 in Seoul, South Korea, is a premier international conference in machine learning.
Main Conference Papers with MERL Authors:
1. Understanding Dynamic Compute Allocation in Recurrent Transformers by Ibraheem Muhammad Moosa, Suhas Lohit, Ye Wang, Moitreya Chatterjee, and Wenpeng Yin.
2. LLawCo: Learning Laws of Cooperation for Modeling Embodied Multi-Agent Behavior by Qinhong Zhou, Chuang Gan, and Anoop Cherian.
3. Memory-Distilled Selection for Noise-Robust Anomaly Detection by Sirojbek Safarov, Jaewoo Park, Yoon G. Jung, Kuan-Chuan Peng, Wonchul Kim, Seongdeok Bang, and Octavia Camps.
4. Partial Ring Scan: Revisiting Scan Order in Vision State Space Models by Yi-Kuan Hsieh, Kuan-Chuan Peng, Xin Li, Ming-Ching Chang, Yu-Chee Tseng, and Jun-Wei Hsieh.
Workshop Papers with MERL Authors:
1. WISE: Weighted Iterative Society-of-Experts for Multimodal Multi-Agent Debate with Probabilistic Consensus by Anoop Cherian, Suhas Lohit, and Kuan-Chuan Peng. (Workshop on Scalable Learning and Optimization for Efficient Multimodal AI Agents (SCALE))
2. MIRROR: Multisensory Implicit Rejection-sampled RObotic policy by Amisha Bhaskar, Pratap Tokekar, Stefano Di Cairano, and Alexander Schperberg. (Workshop on Structured Probabilistic Inference & Generative Modeling)
3. Reinforced Neural Processes: Memory-Efficient Time-Series Forecasting with a World-Feedback-Trained Memory Policy by Nibraas Khan, Gordon Wichern, and Christopher R. Laughman. (Workshop on Reinforcement Learning from World Feedback (RLxF))
4. Connecting Low-Rank Adapters and Policy Stability in GRPO Fine-Tuning by Antonin Rottman, Francesco Tonin, Yongtao Wu, Toshiaki Koike-Akino, and Volkan Cevher. (Workshop on Connecting Low-rank Representations in AI (CoLorAI))
5. EinSort: Sorting is All We Need for Tensorizing LLM by Toshiaki Koike-Akino, Jing Liu, and Ye Wang. (Workshop on Connecting Low-rank Representations in AI (CoLorAI))
6. Temper and Tilt Lead to SLOP: Reward Hacking Mitigation with Inference-Time Alignment by Ye Wang, and Jing Liu, and Toshiaki Koike-Akino. (Workshop on Agents in the Wild: Safety, Security, and Beyond)
- MERL researchers are proud to present 4 main conference papers and 6 workshop papers at ICML 2026. ICML, taking place from July 6-11 in Seoul, South Korea, is a premier international conference in machine learning.
-
NEWS Petros Boufounos elected Vice President–Conferences of the IEEE Signal Processing Society Date: June 24, 2026
MERL Contact: Petros T. Boufounos
Research Areas: Computational Sensing, Signal ProcessingBrief- MERL's Distinguished Research Scientist and IEEE Fellow Dr. Petros Boufounos has been elected Vice President–Conferences of the IEEE Signal Processing Society (SPS) for the 2027–2029 term. In this role, he will serve on the SPS Board of Governors and chair the SPS Conferences Board, overseeing the Society’s conferences, workshops, and other technical meeting activities.
See All News & Events for Signal Processing -
-
Research Highlights
-
Internships
-
EA0234: Internship - Multi-modal sensor fusion for predictive maintenance
-
CI0213: Internship - Efficient Foundation Models for Edge Intelligence
-
EA0237: Internship - Condition Monitoring and Fault Diagnosis
See All Internships for Signal Processing -
-
Openings
-
CI0177: Postdoctoral Research Fellow - Agentic AI
-
SA0297: Postdoctoral Research Fellow - AI for Science
-
ST0175: Postdoctoral Research Fellow - Quantum Technologies
See All Openings at MERL -
-
Recent Publications
- , "Waveforms in 6G and Beyond", IEEE Communications Standards Magazine, June 2026.BibTeX TR2026-099 PDF
- @article{Yuan2026jun,
- author = {{Yuan, Weijie and Wang, Pu and Ahmadi, Hamed and Liu, Bryan}},
- title = {{Waveforms in 6G and Beyond}},
- journal = {IEEE Communications Standards Magazine},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-099}
- }
- , "Robust Current Fault Signature Extraction for Train Traction Motors", 2026 IEEE Transportation Electrification Conference & Expo, June 2026.BibTeX TR2026-080 PDF
- @inproceedings{Liu2026jun2,
- author = {Liu, Dehong and Iwawaki, Tomoyuki and Hirakida, Ken and Matsui, Yoshiki and Wang, Yebin},
- title = {{Robust Current Fault Signature Extraction for Train Traction Motors}},
- booktitle = {2026 IEEE Transportation Electrification Conference \& Expo},
- year = 2026,
- month = jun,
- url = {https://www.merl.com/publications/TR2026-080}
- }
- , "Single View Camera-Based Dynamic Airflow Sensing", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), May 2026.BibTeX TR2026-038 PDF
- @inproceedings{Tandi2026may,
- author = {Tandi, Kevin and Ali, Wael H. and Rapp, Joshua and Mansour, Hassan},
- title = {{Single View Camera-Based Dynamic Airflow Sensing}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2026,
- month = may,
- url = {https://www.merl.com/publications/TR2026-038}
- }
- , "Heatmap-to-SMPL Multi-View Radar Transformer for Multi-Person 3D Pose Estimation", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), DOI: 10.1109/ICASSP55912.2026.11463668, May 2026.BibTeX TR2026-040 PDF
- @inproceedings{Kato2026may,
- author = {Kato, Sorachi and Wang, Pu and Fujihashi, Takuya and Markham, Andrew},
- title = {{Heatmap-to-SMPL Multi-View Radar Transformer for Multi-Person 3D Pose Estimation}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2026,
- month = may,
- publisher = {IEEE},
- doi = {10.1109/ICASSP55912.2026.11463668},
- issn = {2379-190X},
- isbn = {979-8-3315-6701-9},
- url = {https://www.merl.com/publications/TR2026-040}
- }
- , "Unambiguous Range Extension for1 Doppler Single-Photon Lidar", Optics Express, DOI: 10.1364/OE.592528, Vol. 34, No. 9, pp. 15933-15952, May 2026.BibTeX TR2026-050 PDF
- @article{Kitichotkul2026apr,
- author = {Kitichotkul, Ruangrawee and Rapp, Joshua and Ma, Yanting and Mansour, Hassan},
- title = {{Unambiguous range extension for Doppler single-photon lidar}},
- journal = {Optics Express},
- year = 2026,
- volume = 34,
- number = 9,
- pages = {15933--15952},
- month = apr,
- doi = {10.1364/OE.592528},
- url = {https://www.merl.com/publications/TR2026-050}
- }
- , "DUAL-REGULARIZED ITERATIVE ADAPTIVE APPROACH FOR DOA SPECTRUM RECONSTRUCTION IN LIMITED ANGLE SECTOR", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), May 2026.BibTeX TR2026-039 PDF
- @inproceedings{Takahashi2026may,
- author = {Takahashi, Ryuhei and Mansour, Hassan and Boufounos, Petros T.},
- title = {{DUAL-REGULARIZED ITERATIVE ADAPTIVE APPROACH FOR DOA SPECTRUM RECONSTRUCTION IN LIMITED ANGLE SECTOR}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2026,
- month = may,
- url = {https://www.merl.com/publications/TR2026-039}
- }
- , "ProxiCBO: A Consensus-based Method for Composite Optimization", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), DOI: 10.1109/ICASSP55912.2026.11464733, May 2026, pp. 946-950.BibTeX TR2026-041 PDF
- @inproceedings{Zhang2026may,
- author = {Zhang, Haoyu and Ma, Yanting and Kitichotkul, Ruangrawee and Rapp, Joshua and Boufounos, Petros T.},
- title = {{ProxiCBO: A Consensus-based Method for Composite Optimization}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2026,
- pages = {946--950},
- month = may,
- publisher = {IEEE},
- doi = {10.1109/ICASSP55912.2026.11464733},
- issn = {1520-6149},
- isbn = {979-8-3315-6702-6},
- url = {https://www.merl.com/publications/TR2026-041}
- }
- , "Velocity estimation with single-photon lidar", SPIE Conference on Advanced Photon Counting Techniques, Mark A. Itzler, Joshua C. Bienfang, K. Alex McIntosh, Eds., DOI: 10.1117/12.3097621, April 2026, vol. 14019, pp. 1401903.BibTeX TR2026-051 PDF
- @inproceedings{Rapp2026apr,
- author = {Rapp, Joshua and Kitichotkul, Ruangrawee and Ma, Yanting and Mansour, Hassan},
- title = {{Velocity estimation with single-photon lidar}},
- booktitle = {Advanced Photon Counting Techniques XX},
- year = 2026,
- editor = {Mark A. Itzler, Joshua C. Bienfang, K. Alex McIntosh},
- volume = 14019,
- pages = 1401903,
- month = apr,
- publisher = {SPIE},
- doi = {10.1117/12.3097621},
- url = {https://www.merl.com/publications/TR2026-051}
- }
- , "Waveforms in 6G and Beyond", IEEE Communications Standards Magazine, June 2026.
-
Videos
-
Software & Data Downloads
-
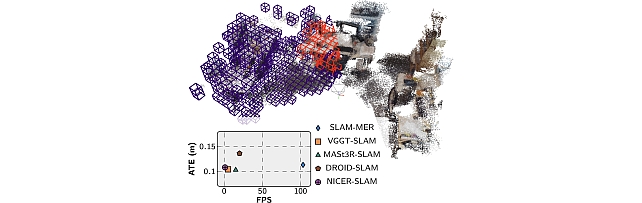
Mitsubishi Electric Research framework for visual SLAM -
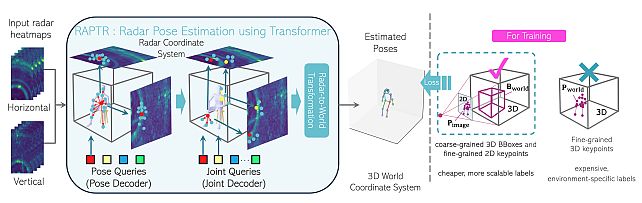
Radar-based 3D Pose Estimation using Transformer -
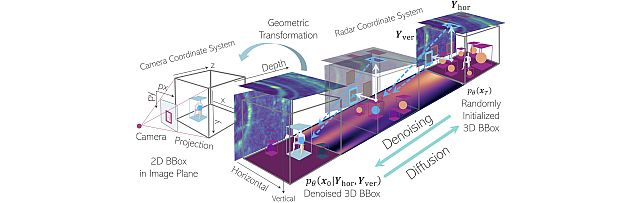
multi-view Radar object dEtection with 3D bounding boX diffusiOn -
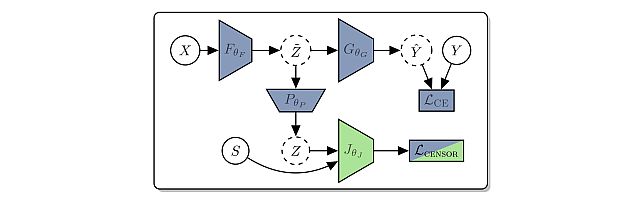
Stabilizing Subject Transfer in EEG Classification with Divergence Estimation -
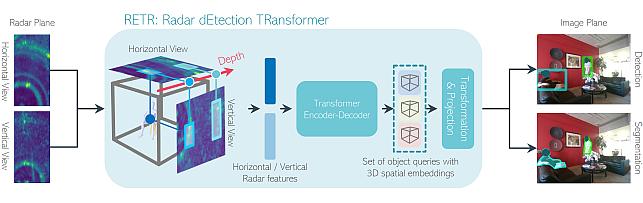
Radar dEtection TRansformer -

Millimeter-wave Multi-View Radar Dataset -
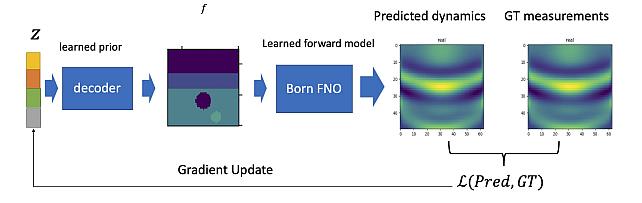
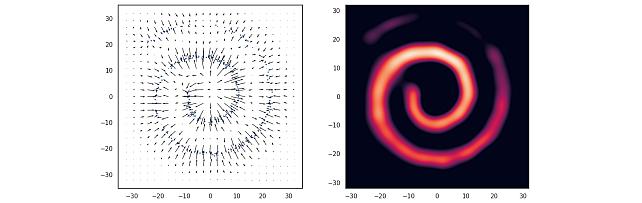
Learned Born Operator for Reflection Tomographic Imaging -
Nonparametric Score Estimators -
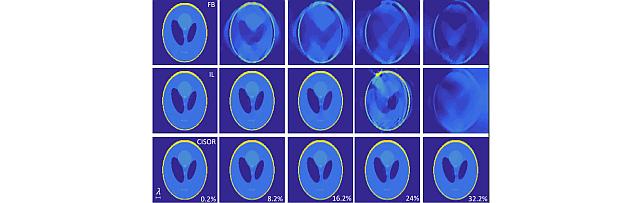
Convergent Inverse Scattering using Optimization and Regularization -
One-Bit CRB
-