Machine Learning
Data-driven approaches to design intelligent algorithms.
MERL has a long history of research activity in machine learning, including the development of various boosting algorithms and contributing to the theory and practice of highly scalable collaborative filtering. Our recent work has focused on deep learning and reinforcement learning, with application to a wide range of applications including automotive, robotics, factory automation, transportation, as well as building and home systems.
Quick Links
-
Researchers

Toshiaki
Koike-Akino
Ye
Wang

Jonathan
Le Roux

Ankush
Chakrabarty

Anoop
Cherian

Gordon
Wichern

Michael J.
Jones

Tim K.
Marks

Philip V.
Orlik

Kieran
Parsons

Stefano
Di Cairano

Pu
(Perry)
Wang
Christopher R.
Laughman

Daniel N.
Nikovski

Devesh K.
Jha

Diego
Romeres

Chiori
Hori

Bingnan
Wang

Suhas
Lohit

Jing
Liu

Yebin
Wang

Matthew
Brand

Hassan
Mansour

Petros T.
Boufounos

François
Germain

Moitreya
Chatterjee

Kuan-Chuan
Peng

Arvind
Raghunathan

Abraham P.
Vinod

Jianlin
Guo

Vedang M.
Deshpande

Siddarth
Jain

Scott A.
Bortoff

Pedro
Miraldo

Yoshiki
Masuyama

Hongtao
Qiao
William S.
Yerazunis

Radu
Corcodel

Chungwei
Lin

Dehong
Liu

Saviz
Mowlavi

Joshua
Rapp

Hongbo
Sun

Wataru
Tsujita

Wael H.
Ali

Yanting
Ma

Anthony
Vetro

Jinyun
Zhang

Purnanand
Elango

Abraham
Goldsmith

Naoko
Sawada

Alexander
Schperberg

Avishai
Weiss

Kenji
Inomata
-
Awards
-
AWARD MERL work receives IEEE Transactions on Automation Science and Engineering Best New Application Paper Award from IEEE Robotics and Automation Society Date: May 19, 2025
Awarded to: Yehan Ma, Yebin Wang, Stefano Di Cairano, Toshiaki Koike-Akino, Jianlin Guo, Philip Orlik, Xinping Guan and Chenyang Lu
MERL Contacts: Stefano Di Cairano; Jianlin Guo; Toshiaki Koike-Akino; Philip V. Orlik; Yebin Wang
Research Areas: Communications, Control, Machine LearningBrief- The paper “Smart Actuation for End-Edge Industrial Control Systems”, co-authored by MERL intern Yehan Ma, MERL researchers Yebin Wang, Stefano Di Cairano, Toshiaki Koike-Akino, Jianlin Guo, and Philip Orlik, and academic collaborators Xinping Guan and Chenyang Lu, was recognized as the Best New Application Paper of the IEEE Transactions on Automation Science and Engineering (T-ASE), for "a new industrial automation solution that ensures safety operation through coordinated co-design of edge model predictive control and local actuation".
The award recognizes the best application paper published in T-ASE over the previous calendar year, for the significance of new applications, technical merit, originality, potential impact on the field, and clarity of presentation.
- The paper “Smart Actuation for End-Edge Industrial Control Systems”, co-authored by MERL intern Yehan Ma, MERL researchers Yebin Wang, Stefano Di Cairano, Toshiaki Koike-Akino, Jianlin Guo, and Philip Orlik, and academic collaborators Xinping Guan and Chenyang Lu, was recognized as the Best New Application Paper of the IEEE Transactions on Automation Science and Engineering (T-ASE), for "a new industrial automation solution that ensures safety operation through coordinated co-design of edge model predictive control and local actuation".
-
AWARD MERL Wins Awards at NeurIPS LLM Privacy Challenge Date: December 15, 2024
Awarded to: Jing Liu, Ye Wang, Toshiaki Koike-Akino, Tsunato Nakai, Kento Oonishi, Takuya Higashi
MERL Contacts: Toshiaki Koike-Akino; Jing Liu; Ye Wang
Research Areas: Artificial Intelligence, Machine Learning, Information SecurityBrief- The Mitsubishi Electric Privacy Enhancing Technologies (MEL-PETs) team, consisting of a collaboration of MERL and Mitsubishi Electric researchers, won awards at the NeurIPS 2024 Large Language Model (LLM) Privacy Challenge. In the Blue Team track of the challenge, we won the 3rd Place Award, and in the Red Team track, we won the Special Award for Practical Attack.
-
AWARD University of Padua and MERL team wins the AI Olympics with RealAIGym competition at IROS24 Date: October 17, 2024
Awarded to: Niccolò Turcato, Alberto Dalla Libera, Giulio Giacomuzzo, Ruggero Carli, Diego Romeres
MERL Contact: Diego Romeres
Research Areas: Artificial Intelligence, Dynamical Systems, Machine Learning, RoboticsBrief- The team composed of the control group at the University of Padua and MERL's Optimization and Robotic team ranked 1st out of the 4 finalist teams that arrived to the 2nd AI Olympics with RealAIGym competition at IROS 24, which focused on control of under-actuated robots. The team was composed by Niccolò Turcato, Alberto Dalla Libera, Giulio Giacomuzzo, Ruggero Carli and Diego Romeres. The competition was organized by the German Research Center for Artificial Intelligence (DFKI), Technical University of Darmstadt and Chalmers University of Technology.
The competition and award ceremony was hosted by IEEE International Conference on Intelligent Robots and Systems (IROS) on October 17, 2024 in Abu Dhabi, UAE. Diego Romeres presented the team's method, based on a model-based reinforcement learning algorithm called MC-PILCO.
- The team composed of the control group at the University of Padua and MERL's Optimization and Robotic team ranked 1st out of the 4 finalist teams that arrived to the 2nd AI Olympics with RealAIGym competition at IROS 24, which focused on control of under-actuated robots. The team was composed by Niccolò Turcato, Alberto Dalla Libera, Giulio Giacomuzzo, Ruggero Carli and Diego Romeres. The competition was organized by the German Research Center for Artificial Intelligence (DFKI), Technical University of Darmstadt and Chalmers University of Technology.
See All Awards for Machine Learning -
-
News & Events
-
NEWS Toshiaki Koike-Akino to give a tutorial talk at ISIT 2025 Quantum Hackathon Date: June 22, 2025
Where: IEEE International Symposium on Information Theory (ISIT)
MERL Contact: Toshiaki Koike-Akino
Research Areas: Artificial Intelligence, Communications, Data Analytics, Machine Learning, Optimization, Signal Processing, Human-Computer Interaction, Information SecurityBrief- Toshiaki Koike-Akino is invited to present a tutorial talk at IEEE ISIT 2025 Quantum Hackathon, to be held at Ann Arbor, Michigan, USA. The talk, entitled "Emerging Quantum AI Technology", will discuss the recent trends, challenges, and applications of quantum artificial intelligence (QAI) technologies.
The ISIT 2025 Quantum Hackathon invites participants to explore the intersection of quantum computing and information theory. Participants will work with quantum simulators, available quantum hardware, and state-of-the-art development kits to create innovative solutions that connect quantum advancements with challenges in communication and signal processing.
The IEEE International Symposium on Information Theory (ISIT) is the flagship conference of the IEEE Information Theory Society. The symposium centers around the presentation in all of the areas of information theory, including source and channel coding, communication theory and systems, cryptography and security, detection and estimation, networks, pattern recognition and learning, statistics, stochastic processes and complexity, and signal processing.
- Toshiaki Koike-Akino is invited to present a tutorial talk at IEEE ISIT 2025 Quantum Hackathon, to be held at Ann Arbor, Michigan, USA. The talk, entitled "Emerging Quantum AI Technology", will discuss the recent trends, challenges, and applications of quantum artificial intelligence (QAI) technologies.
-
NEWS MERL Papers and Workshops at CVPR 2025 Date: June 11, 2025 - June 15, 2025
Where: Nashville, TN, USA
MERL Contacts: Matthew Brand; Moitreya Chatterjee; Anoop Cherian; François Germain; Michael J. Jones; Toshiaki Koike-Akino; Jing Liu; Suhas Lohit; Tim K. Marks; Pedro Miraldo; Kuan-Chuan Peng; Naoko Sawada; Pu (Perry) Wang; Ye Wang
Research Areas: Artificial Intelligence, Computer Vision, Machine Learning, Signal Processing, Speech & AudioBrief- MERL researchers are presenting 2 conference papers, co-organizing two workshops, and presenting 7 workshop papers at the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2025 conference, which will be held in Nashville, TN, USA from June 11-15, 2025. CVPR is one of the most prestigious and competitive international conferences in the area of computer vision. Details of MERL contributions are provided below:
Main Conference Papers:
1. "UWAV: Uncertainty-weighted Weakly-supervised Audio-Visual Video Parsing" by Y.H. Lai, J. Ebbers, Y. F. Wang, F. Germain, M. J. Jones, M. Chatterjee
This work deals with the task of weakly‑supervised Audio-Visual Video Parsing (AVVP) and proposes a novel, uncertainty-aware algorithm called UWAV towards that end. UWAV works by producing more reliable segment‑level pseudo‑labels while explicitly weighting each label by its prediction uncertainty. This uncertainty‑aware training, combined with a feature‑mixup regularization scheme, promotes inter‑segment consistency in the pseudo-labels. As a result, UWAV achieves state‑of‑the‑art performance on two AVVP datasets across multiple metrics, demonstrating both effectiveness and strong generalizability.
Paper: https://www.merl.com/publications/TR2025-072
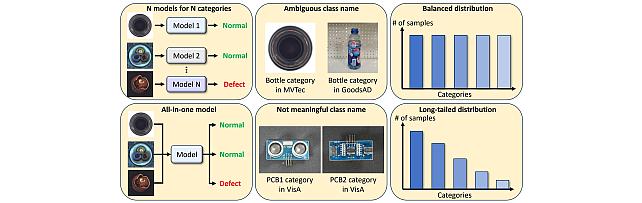
2. "TailedCore: Few-Shot Sampling for Unsupervised Long-Tail Noisy Anomaly Detection" by Y. G. Jung, J. Park, J. Yoon, K.-C. Peng, W. Kim, A. B. J. Teoh, and O. Camps.
This work tackles unsupervised anomaly detection in complex scenarios where normal data is noisy and has an unknown, imbalanced class distribution. Existing models face a trade-off between robustness to noise and performance on rare (tail) classes. To address this, the authors propose TailSampler, which estimates class sizes from embedding similarities to isolate tail samples. Using TailSampler, they develop TailedCore, a memory-based model that effectively captures tail class features while remaining noise-robust, outperforming state-of-the-art methods in extensive evaluations.
paper: https://www.merl.com/publications/TR2025-077
MERL Co-Organized Workshops:
1. Multimodal Algorithmic Reasoning (MAR) Workshop, organized by A. Cherian, K.-C. Peng, S. Lohit, H. Zhou, K. Smith, L. Xue, T. K. Marks, and J. Tenenbaum.
Workshop link: https://marworkshop.github.io/cvpr25/
2. The 6th Workshop on Fair, Data-Efficient, and Trusted Computer Vision, organized by N. Ratha, S. Karanam, Z. Wu, M. Vatsa, R. Singh, K.-C. Peng, M. Merler, and K. Varshney.
Workshop link: https://fadetrcv.github.io/2025/
Workshop Papers:
1. "FreBIS: Frequency-Based Stratification for Neural Implicit Surface Representations" by N. Sawada, P. Miraldo, S. Lohit, T.K. Marks, and M. Chatterjee (Oral)
With their ability to model object surfaces in a scene as a continuous function, neural implicit surface reconstruction methods have made remarkable strides recently, especially over classical 3D surface reconstruction methods, such as those that use voxels or point clouds. Towards this end, we propose FreBIS - a neural implicit‑surface framework that avoids overloading a single encoder with every surface detail. It divides a scene into several frequency bands and assigns a dedicated encoder (or group of encoders) to each band, then enforces complementary feature learning through a redundancy‑aware weighting module. Swapping this frequency‑stratified stack into an off‑the‑shelf reconstruction pipeline markedly boosts 3D surface accuracy and view‑consistent rendering on the challenging BlendedMVS dataset.
paper: https://www.merl.com/publications/TR2025-074
2. "Multimodal 3D Object Detection on Unseen Domains" by D. Hegde, S. Lohit, K.-C. Peng, M. J. Jones, and V. M. Patel.
LiDAR-based object detection models often suffer performance drops when deployed in unseen environments due to biases in data properties like point density and object size. Unlike domain adaptation methods that rely on access to target data, this work tackles the more realistic setting of domain generalization without test-time samples. We propose CLIX3D, a multimodal framework that uses both LiDAR and image data along with supervised contrastive learning to align same-class features across domains and improve robustness. CLIX3D achieves state-of-the-art performance across various domain shifts in 3D object detection.
paper: https://www.merl.com/publications/TR2025-078
3. "Improving Open-World Object Localization by Discovering Background" by A. Singh, M. J. Jones, K.-C. Peng, M. Chatterjee, A. Cherian, and E. Learned-Miller.
This work tackles open-world object localization, aiming to detect both seen and unseen object classes using limited labeled training data. While prior methods focus on object characterization, this approach introduces background information to improve objectness learning. The proposed framework identifies low-information, non-discriminative image regions as background and trains the model to avoid generating object proposals there. Experiments on standard benchmarks show that this method significantly outperforms previous state-of-the-art approaches.
paper: https://www.merl.com/publications/TR2025-058
4. "PF3Det: A Prompted Foundation Feature Assisted Visual LiDAR 3D Detector" by K. Li, T. Zhang, K.-C. Peng, and G. Wang.
This work addresses challenges in 3D object detection for autonomous driving by improving the fusion of LiDAR and camera data, which is often hindered by domain gaps and limited labeled data. Leveraging advances in foundation models and prompt engineering, the authors propose PF3Det, a multi-modal detector that uses foundation model encoders and soft prompts to enhance feature fusion. PF3Det achieves strong performance even with limited training data. It sets new state-of-the-art results on the nuScenes dataset, improving NDS by 1.19% and mAP by 2.42%.
paper: https://www.merl.com/publications/TR2025-076
5. "Noise Consistency Regularization for Improved Subject-Driven Image Synthesis" by Y. Ni., S. Wen, P. Konius, A. Cherian
Fine-tuning Stable Diffusion enables subject-driven image synthesis by adapting the model to generate images containing specific subjects. However, existing fine-tuning methods suffer from two key issues: underfitting, where the model fails to reliably capture subject identity, and overfitting, where it memorizes the subject image and reduces background diversity. To address these challenges, two auxiliary consistency losses are porposed for diffusion fine-tuning. First, a prior consistency regularization loss ensures that the predicted diffusion noise for prior (non- subject) images remains consistent with that of the pretrained model, improving fidelity. Second, a subject consistency regularization loss enhances the fine-tuned model’s robustness to multiplicative noise modulated latent code, helping to preserve subject identity while improving diversity. Our experimental results demonstrate the effectiveness of our approach in terms of image diversity, outperforming DreamBooth in terms of CLIP scores, background variation, and overall visual quality.
paper: https://www.merl.com/publications/TR2025-073
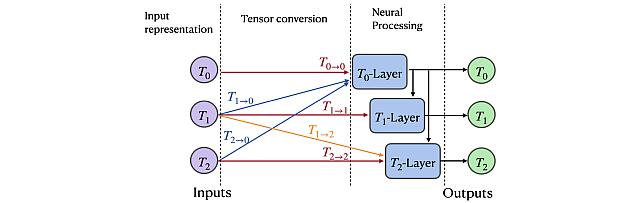
6. "LatentLLM: Attention-Aware Joint Tensor Compression" by T. Koike-Akino, X. Chen, J. Liu, Y. Wang, P. Wang, M. Brand
We propose a new framework to convert a large foundation model such as large language models (LLMs)/large multi- modal models (LMMs) into a reduced-dimension latent structure. Our method uses a global attention-aware joint tensor decomposition to significantly improve the model efficiency. We show the benefit on several benchmark including multi-modal reasoning tasks.
paper: https://www.merl.com/publications/TR2025-075
7. "TuneComp: Joint Fine-Tuning and Compression for Large Foundation Models" by T. Koike-Akino, X. Chen, J. Liu, Y. Wang, P. Wang, M. Brand
To reduce model size during post-training, compression methods, including knowledge distillation, low-rank approximation, and pruning, are often applied after fine- tuning the model. However, sequential fine-tuning and compression sacrifices performance, while creating a larger than necessary model as an intermediate step. In this work, we aim to reduce this gap, by directly constructing a smaller model while guided by the downstream task. We propose to jointly fine-tune and compress the model by gradually distilling it to a pruned low-rank structure. Experiments demonstrate that joint fine-tuning and compression significantly outperforms other sequential compression methods.
paper: https://www.merl.com/publications/TR2025-079
- MERL researchers are presenting 2 conference papers, co-organizing two workshops, and presenting 7 workshop papers at the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2025 conference, which will be held in Nashville, TN, USA from June 11-15, 2025. CVPR is one of the most prestigious and competitive international conferences in the area of computer vision. Details of MERL contributions are provided below:
See All News & Events for Machine Learning -
-
Research Highlights
-
PS-NeuS: A Probability-guided Sampler for Neural Implicit Surface Rendering -
Quantum AI Technology -
TI2V-Zero: Zero-Shot Image Conditioning for Text-to-Video Diffusion Models -
Gear-NeRF: Free-Viewpoint Rendering and Tracking with Motion-Aware Spatio-Temporal Sampling -
Steered Diffusion -
Sustainable AI -
Edge-Assisted Internet of Vehicles for Smart Mobility -
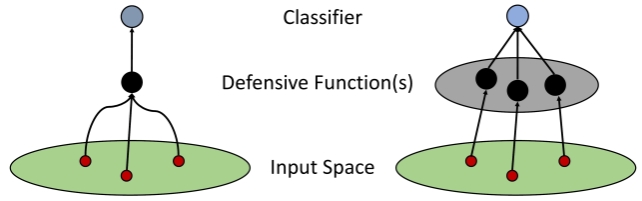
Robust Machine Learning -
mmWave Beam-SNR Fingerprinting (mmBSF) -
Video Anomaly Detection -
Biosignal Processing for Human-Machine Interaction -
MERL Shopping Dataset -
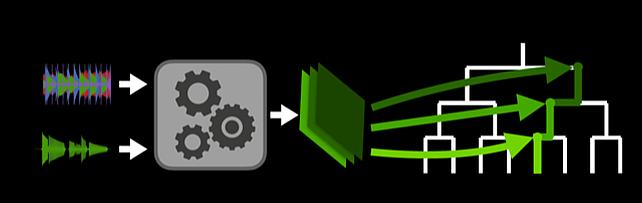
Task-aware Unified Source Separation - Audio Examples
-
-
Internships
-
CI0080: Internship - Efficient AI
We are on the lookout for passionate and skilled interns to join our cutting-edge research team focused on developing efficient machine learning techniques for sustainability. This is an exciting opportunity to make a real impact in the field of AI and environmental conservation, with the aim of publishing at leading AI research venues.
What We're Looking For:
- Advanced research experience in generative models and computationally efficient models
- Hands-on skills for large language models (LLM), vision language models (VLM), large multi-modal models (LMM), foundation models (FoMo)
- Deep understanding of state-of-the-art machine learning methods
- Proficiency in Python and PyTorch
- Familiarity with various deep learning frameworks
- Ph.D. candidates who have completed at least half of their program
Internship Details:
- Duration: approximately 3 months
- Flexible start dates available
- Objective: publish research results at leading AI research venues
If you are a highly motivated individual with a passion for applying AI to sustainability challenges, we want to hear from you! This internship offers a unique chance to work on meaningful projects at the intersection of machine learning and environmental sustainability.
-
OR0115: Internship - Whole-body dexterous manipulation
MERL is looking for a highly motivated individual to work on whole-body dexterous manipulation. The research will develop robot motor skills for whole-body, dexterous manipulation using optimization and/or learning algorithms. The ideal candidate should have experience in either one or multiple of the following topics: Optimization Algorithms for contact systems, Reinforcement Learning, control through contacts, and Behavioral cloning. Senior PhD students in robotics and engineering with a focus on contact-rich manipulation are encouraged to apply. Prior experience working with physical robotic systems (and vision and tactile sensors) is required as results need to be implemented on a physical hardware. Good coding skills in Python ML libraries like PyTorch etc. and/or relevant Optimization packages is required. A successful internship will result in submission of results to a peer-reviewed robotics journal in collaboration with MERL researchers. The expected duration of internship is 4-5 months with start date in May/June 2025. This internship is preferred to be onsite at MERL.
Required Specific Experience
- Prior experience working with physical hardware system is required.
- Prior publication experience in robotics venues like ICRA,RSS, CoRL.
-
ST0096: Internship - Multimodal Tracking and Imaging
MERL is seeking a motivated intern to assist in developing hardware and algorithms for multimodal imaging applications. The project involves integration of radar, camera, and depth sensors in a variety of sensing scenarios. The ideal candidate should have experience with FMCW radar and/or depth sensing, and be fluent in Python and scripting methods. Familiarity with optical tracking of humans and experience with hardware prototyping is desired. Good knowledge of computational imaging and/or radar imaging methods is a plus.
Required Specific Experience
- Experience with Python and Python Deep Learning Frameworks.
- Experience with FMCW radar and/or Depth Sensors.
See All Internships for Machine Learning -
-
Openings
-
CI0130: Postdoctoral Research Fellow - Artificial General Intelligence (AGI)
-
EA0042: Research Scientist - Control & Learning
-
CA0093: Research Scientist - Control for Autonomous Systems
See All Openings at MERL -
-
Recent Publications
- , "A Hierarchical Approach for Tractor-trailer Motion Planning Using Graph Search and Reinforcement Learning", European Control Conference (ECC), June 2025.BibTeX TR2025-093 PDF
- @inproceedings{Ma2025jun,
- author = {Ma, Haitong and Zhang, Tianpeng and Li, Na and {Di Cairano}, Stefano and Wang, Yebin},
- title = {{A Hierarchical Approach for Tractor-trailer Motion Planning Using Graph Search and Reinforcement Learning}},
- booktitle = {European Control Conference (ECC)},
- year = 2025,
- month = jun,
- url = {https://www.merl.com/publications/TR2025-093}
- }
- , "Quantum Diffusion Models for Few-Shot Learning", ICAD, June 2025.BibTeX TR2025-095 PDF
- @inproceedings{Wang2025jun2,
- author = {Wang, Ruhan and Wang, Ye and Liu, Jing and Koike-Akino, Toshiaki},
- title = {{Quantum Diffusion Models for Few-Shot Learning}},
- booktitle = {ICAD},
- year = 2025,
- month = jun,
- url = {https://www.merl.com/publications/TR2025-095}
- }
- , "Image-based Deep Learning Models for Electric Motors", International Conference on the Computation of Electromagnetic Fields (COMPUMAG), June 2025.BibTeX TR2025-088 PDF
- @inproceedings{Sun2025jun,
- author = {Sun, Siyuan and Wang, Ye and Koike-Akino, Toshiaki and Yamamoto, Tatsuya and Sakamoto, Yusuke and Wang, Bingnan},
- title = {{Image-based Deep Learning Models for Electric Motors}},
- booktitle = {International Conference on the Computation of Electromagnetic Fields (COMPUMAG)},
- year = 2025,
- month = jun,
- url = {https://www.merl.com/publications/TR2025-088}
- }
- , "Physics-informed Machine Learning with Heuristic Feedback Control Layer for Autonomous Vehicle Control", IEEE Intelligent Vehicles Symposium (IV), June 2025.BibTeX TR2025-087 PDF
- @inproceedings{Li2025jun2,
- author = {Li, Xianning and Wang, Yebin and Ozbay, Kaan and Jiang, Zhong-Ping},
- title = {{Physics-informed Machine Learning with Heuristic Feedback Control Layer for Autonomous Vehicle Control}},
- booktitle = {IEEE Intelligent Vehicles Symposium (IV)},
- year = 2025,
- month = jun,
- url = {https://www.merl.com/publications/TR2025-087}
- }
- , "Single- and Multi-Channel Speech Enhancement and Separation for Far-Field Conversation Recognition," Tech. Rep. TR2025-097, Jelinek Summer Workshop on Speech and Language Technology (JSALT), June 2025.BibTeX TR2025-097 PDF
- @techreport{Masuyama2025jun,
- author = {{{Masuyama, Yoshiki}}},
- title = {{{Single- and Multi-Channel Speech Enhancement and Separation for Far-Field Conversation Recognition}}},
- institution = {Jelinek Summer Workshop on Speech and Language Technology (JSALT)},
- year = 2025,
- month = jun,
- url = {https://www.merl.com/publications/TR2025-097}
- }
- , "Deep Generalized Canonical Correlation Analysis for Motor Fault Diagnosis", 2025 IEEE Industry Applications Society Annual Meeting (IAS), June 2025.BibTeX TR2025-085 PDF
- @inproceedings{Guo2025jun2,
- author = {Guo, Peikun and Liu, Dehong and Wang, Bingnan and Wang, Yebin and Inoue, Hiroshi and Kanemaru, Makoto},
- title = {{Deep Generalized Canonical Correlation Analysis for Motor Fault Diagnosis}},
- booktitle = {2025 IEEE Industry Applications Society Annual Meeting (IAS)},
- year = 2025,
- month = jun,
- url = {https://www.merl.com/publications/TR2025-085}
- }
- , "TuneComp: Joint Fine-Tuning and Compression for Large Foundation Models", IEEE Conference on Computer Vision and Pattern Recognition (CVPR) workshop on Efficient and On-Device Generation, June 2025.BibTeX TR2025-079 PDF
- @inproceedings{Chen2025jun,
- author = {Chen, Xiangyu and Liu, Jing and Wang, Ye and Brand, Matthew and Wang, Pu and Koike-Akino, Toshiaki},
- title = {{TuneComp: Joint Fine-Tuning and Compression for Large Foundation Models}},
- booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR) workshop on Efficient and On-Device Generation},
- year = 2025,
- month = jun,
- url = {https://www.merl.com/publications/TR2025-079}
- }
- , "Multimodal 3D Object Detection on Unseen Domains", IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshop, June 2025.BibTeX TR2025-078 PDF
- @inproceedings{Hegde2025jun,
- author = {Hegde, Deepti and Lohit, Suhas and Peng, Kuan-Chuan and Jones, Michael J. and Patel, Vishal M.},
- title = {{Multimodal 3D Object Detection on Unseen Domains}},
- booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshop},
- year = 2025,
- month = jun,
- url = {https://www.merl.com/publications/TR2025-078}
- }
- , "A Hierarchical Approach for Tractor-trailer Motion Planning Using Graph Search and Reinforcement Learning", European Control Conference (ECC), June 2025.
-
Videos
-
Software & Data Downloads
-
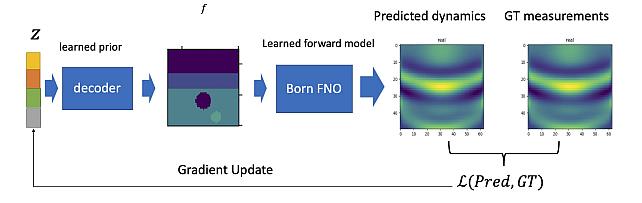
Learned Born Operator for Reflection Tomographic Imaging -

MEL-PETs Defense for LLM Privacy Challenge -
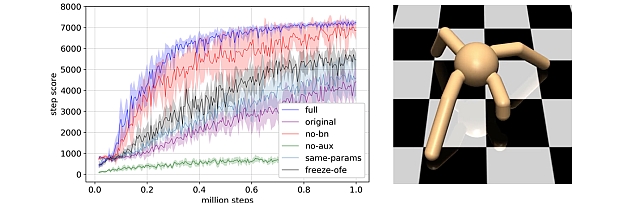
Generalization in Deep RL with a Robust Adaptation Module -

MEL-PETs Joint-Context Attack for LLM Privacy Challenge -
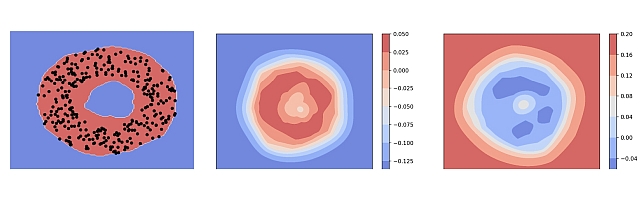
Group Representation Networks -
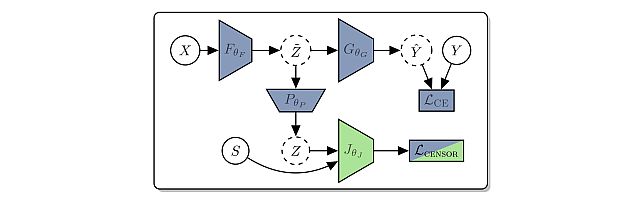
Stabilizing Subject Transfer in EEG Classification with Divergence Estimation -
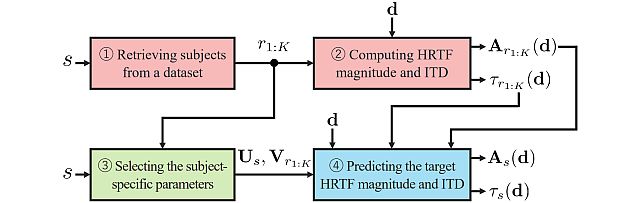
Retrieval-Augmented Neural Field for HRTF Upsampling and Personalization -

ComplexVAD Dataset -
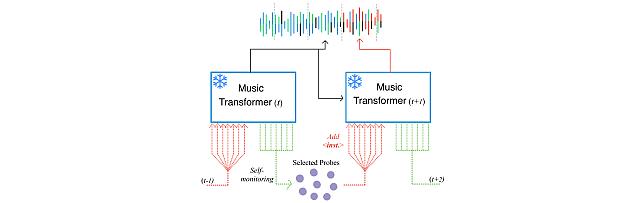
Self-Monitored Inference-Time INtervention for Generative Music Transformers -
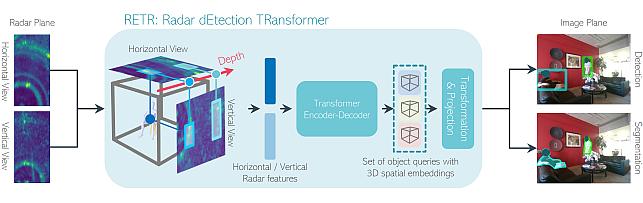
Radar dEtection TRansformer -

Millimeter-wave Multi-View Radar Dataset -
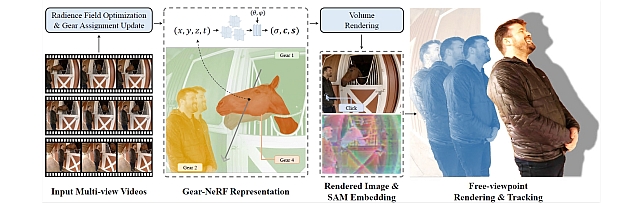
Gear Extensions of Neural Radiance Fields -
Long-Tailed Anomaly Detection Dataset -
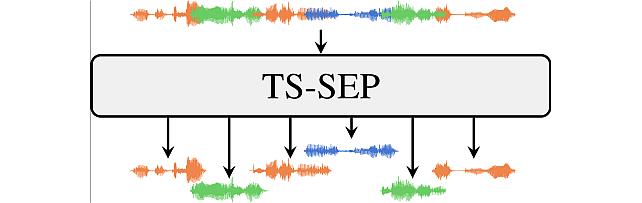
Target-Speaker SEParation -

Pixel-Grounded Prototypical Part Networks -
Steered Diffusion -
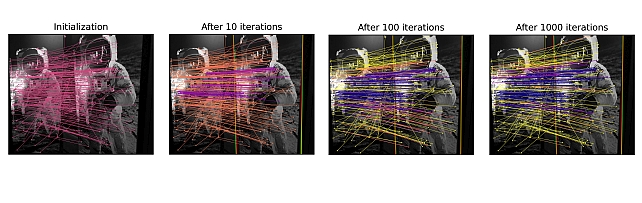
BAyesian Network for adaptive SAmple Consensus -
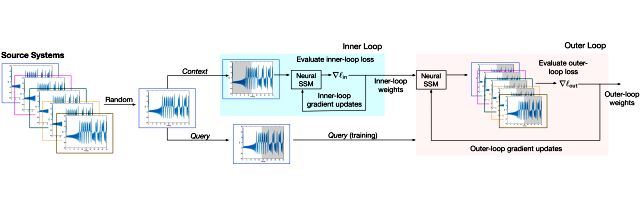
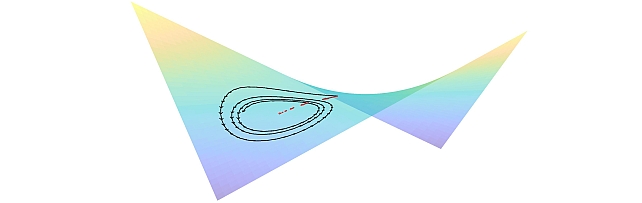
Meta-Learning State Space Models -
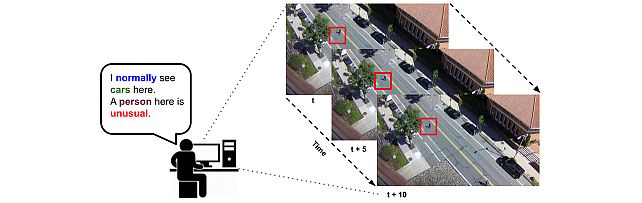
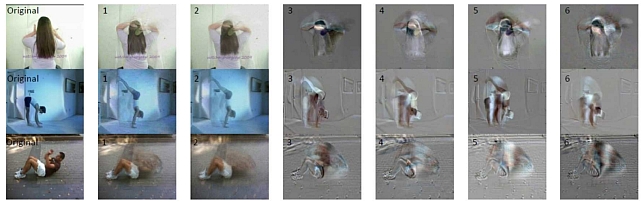
Explainable Video Anomaly Localization -
Simple Multimodal Algorithmic Reasoning Task Dataset -
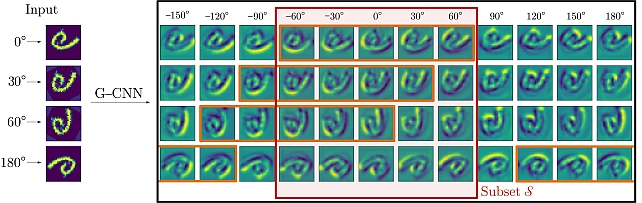
Partial Group Convolutional Neural Networks -
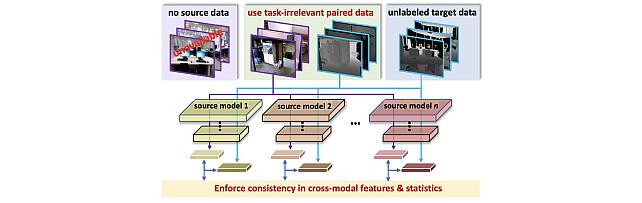
SOurce-free Cross-modal KnowledgE Transfer -
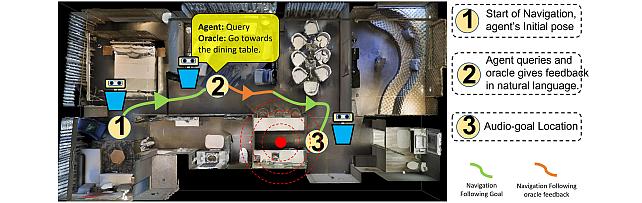
Audio-Visual-Language Embodied Navigation in 3D Environments -
Nonparametric Score Estimators -
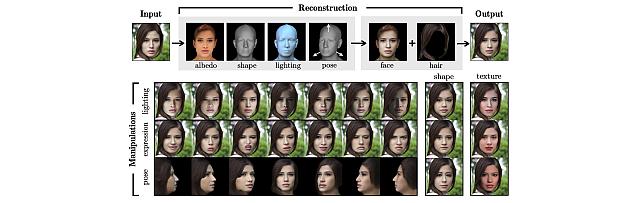
3D MOrphable STyleGAN -
Instance Segmentation GAN -
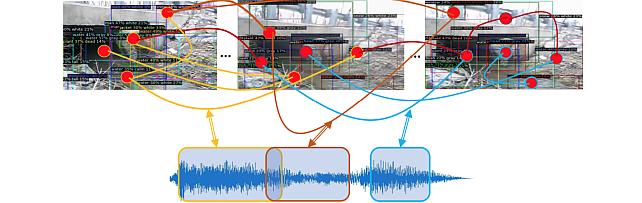
Audio Visual Scene-Graph Segmentor -
Generalized One-class Discriminative Subspaces -
Hierarchical Musical Instrument Separation -
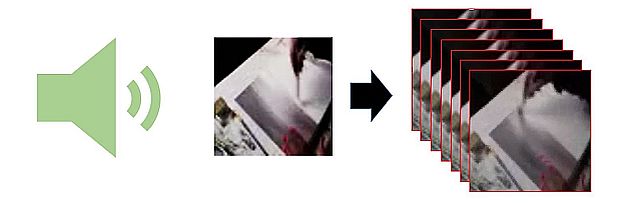
Generating Visual Dynamics from Sound and Context -

Adversarially-Contrastive Optimal Transport -
Online Feature Extractor Network -
MotionNet -
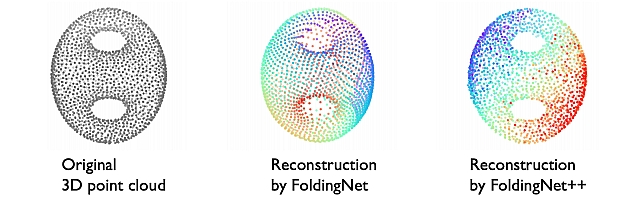
FoldingNet++ -
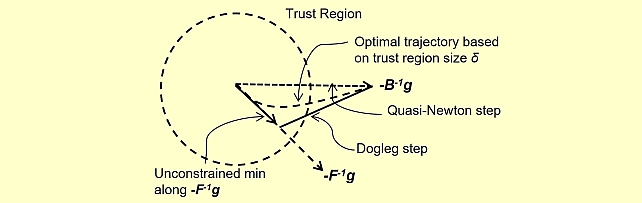
Quasi-Newton Trust Region Policy Optimization -
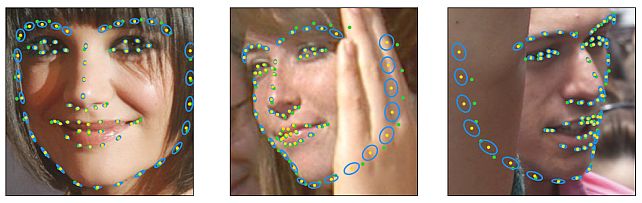
Landmarks’ Location, Uncertainty, and Visibility Likelihood -
Robust Iterative Data Estimation -
Gradient-based Nikaido-Isoda -
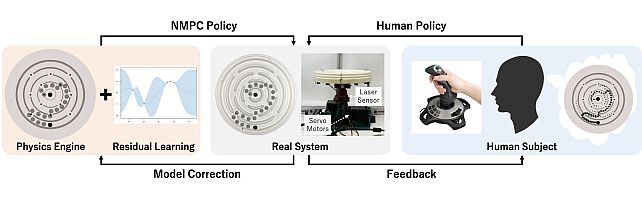
Circular Maze Environment -
Discriminative Subspace Pooling -
Kernel Correlation Network -
Fast Resampling on Point Clouds via Graphs -
FoldingNet -
Deep Category-Aware Semantic Edge Detection -

MERL Shopping Dataset
-