Devesh K. Jha

- Phone: 617-621-7513
- Email:
-
Position:
Research / Technical Staff
Principal Research Scientist -
Education:
Ph.D., Pennsylvania State University, 2016 -
Research Areas:
External Links:
Devesh's Quick Links
-
Biography
Devesh's PhD Thesis was on decision & control of autonomous systems. He also got a Master's degree in Mathematics from Penn State. His research interests are in the areas of Machine Learning, Time Series Analytics and Robotics. He was a recipient of the best student paper award at the 1st ACM SIGKDD workshop on Machine Learning for Prognostics and Health Management at KDD 2016, San Francisco.
-
Recent News & Events
-
NEWS Devesh Jha appointed as an Area Chair for NeurIPS 2024 Date: December 9, 2024 - December 15, 2024
Where: NeurIPS 2024
MERL Contact: Devesh K. Jha
Research Areas: Artificial Intelligence, Machine LearningBrief- Devesh Jha, a Principal Research Scientist in the Optimization & Intelligent Robtics team, has been appointed as an area chair for Conference on Neural Information Processing Systems (NeurIPS) 2024. NeurIPS is the premier Machine Learning (ML) and Artificial Intelligence (AI) conference that includes invited talks, demonstrations, symposia, and oral and poster presentations of refereed papers.
-
TALK [MERL Seminar Series 2023] Prof. Zac Manchester presents talk titled Composable Optimization for Robotic Simulation, Planning, and Control Date & Time: Wednesday, September 27, 2023; 1:00 PM
Speaker: Zac Manchester, Carnegie Mellon University
MERL Host: Devesh K. Jha
Research Areas: Optimization, RoboticsAbstract Contact interactions are pervasive in key real-world robotic tasks like manipulation and walking. However, the non-smooth dynamics associated with impacts and friction remain challenging to model, and motion planning and control algorithms that can fluently and efficiently reason about contact remain elusive. In this talk, I will share recent work from my research group that takes an “optimization-first” approach to these challenges: collision detection, physics, motion planning, and control are all posed as constrained optimization problems. We then build a set of algorithmic and numerical tools that allow us to flexibly compose these optimization sub-problems to solve complex robotics problems involving discontinuous, unplanned, and uncertain contact mechanics.
Contact interactions are pervasive in key real-world robotic tasks like manipulation and walking. However, the non-smooth dynamics associated with impacts and friction remain challenging to model, and motion planning and control algorithms that can fluently and efficiently reason about contact remain elusive. In this talk, I will share recent work from my research group that takes an “optimization-first” approach to these challenges: collision detection, physics, motion planning, and control are all posed as constrained optimization problems. We then build a set of algorithmic and numerical tools that allow us to flexibly compose these optimization sub-problems to solve complex robotics problems involving discontinuous, unplanned, and uncertain contact mechanics.
See All News & Events for Devesh -
-
Awards
-
AWARD Honorable Mention Award at NeurIPS 23 Instruction Workshop Date: December 15, 2023
Awarded to: Lingfeng Sun, Devesh K. Jha, Chiori Hori, Siddharth Jain, Radu Corcodel, Xinghao Zhu, Masayoshi Tomizuka and Diego Romeres
MERL Contacts: Radu Corcodel; Chiori Hori; Siddarth Jain; Devesh K. Jha; Diego Romeres
Research Areas: Artificial Intelligence, Machine Learning, RoboticsBrief- MERL Researchers received an "Honorable Mention award" at the Workshop on Instruction Tuning and Instruction Following at the NeurIPS 2023 conference in New Orleans. The workshop was on the topic of instruction tuning and Instruction following for Large Language Models (LLMs). MERL researchers presented their work on interactive planning using LLMs for partially observable robotic tasks during the oral presentation session at the workshop.
-
AWARD MERL Researchers Win Best Workshop Poster Award at the 2023 IEEE International Conference on Robotics and Automation (ICRA) Date: June 2, 2023
Awarded to: Yuki Shirai, Devesh Jha, Arvind Raghunathan and Dennis Hong
MERL Contacts: Devesh K. Jha; Arvind Raghunathan
Research Areas: Artificial Intelligence, Optimization, RoboticsBrief- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
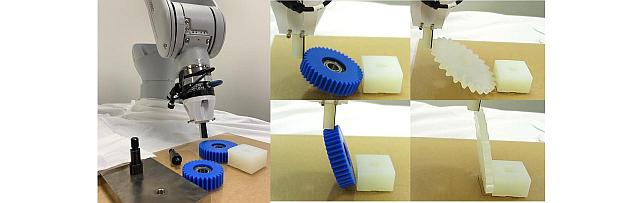
The paper presents a technique to manipulate an object using a tool in a closed-loop fashion using vision-based tactile sensors. More information about the workshop and the various speakers can be found here https://sites.google.com/view/icra2023embracingcontacts/home.
- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
-
AWARD MERL Researcher Devesh Jha Wins the Rudolf Kalman Best Paper Award 2019 Date: October 10, 2019
Awarded to: Devesh Jha, Nurali Virani, Zhenyuan Yuan, Ishana Shekhawat and Asok Ray
MERL Contact: Devesh K. Jha
Research Areas: Artificial Intelligence, Control, Data Analytics, Machine Learning, RoboticsBrief- MERL researcher Devesh Jha has won the Rudolf Kalman Best Paper Award 2019 for the paper entitled "Imitation of Demonstrations Using Bayesian Filtering With Nonparametric Data-Driven Models". This paper, published in a Special Commemorative Issue for Rudolf E. Kalman in the ASME JDSMC in March 2018, uses Bayesian filtering for imitation learning in Hidden Mode Hybrid Systems. This award is given annually by the Dynamic Systems and Control Division of ASME to the authors of the best paper published in the ASME Journal of Dynamic Systems Measurement and Control during the preceding year.
-
-
MERL Publications
- , "Chance-Constrained Optimization for Contact-rich Systems using Mixed Integer Programming", Nonlinear Analysis: Hybrid Systems, December 2024.BibTeX TR2024-008 PDF
- @article{Shirai2024dec,
- author = {Shirai, Yuki and Jha, Devesh K. and Raghunathan, Arvind and Romeres, Diego},
- title = {Chance-Constrained Optimization for Contact-rich Systems using Mixed Integer Programming},
- journal = {Nonlinear Analysis: Hybrid Systems},
- year = 2024,
- month = dec,
- url = {https://www.merl.com/publications/TR2024-008}
- }
- , "Multi-level Reasoning for Robotic Assembly: From Sequence Inference to Contact Selection", IEEE International Conference on Robotics and Automation (ICRA), March 2024.BibTeX TR2024-033 PDF Video
- @inproceedings{Zhu2024mar,
- author = {Zhu, Xinghao and Jha, Devesh K. and Romeres, Diego and Sun, Lingfeng and Tomizuka, Masayoshi and Cherian, Anoop},
- title = {Multi-level Reasoning for Robotic Assembly: From Sequence Inference to Contact Selection},
- booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
- year = 2024,
- month = mar,
- url = {https://www.merl.com/publications/TR2024-033}
- }
- , "Robust In-Hand Manipulation with Extrinsic Contacts", arXiv, March 2024.
- , "iPolicy: Incremental Policy Algorithms for Feedback Motion Planning", arXiv, January 2024.
- , "Interactive Planning Using Large Language Models for Partially Observable Robotics Tasks", Advances in Neural Information Processing Systems (NeurIPS) Workshop on Instruction Tuning and Instruction Following, December 2023.BibTeX TR2023-148 PDF
- @inproceedings{Sun2023dec,
- author = {Sun, Lingfeng and Jha, Devesh K. and Hori, Chiori and Jain, Siddarth and Corcodel, Radu and Zhu, Xinghao and Tomizuka, Masayoshi and Romeres, Diego},
- title = {Interactive Planning Using Large Language Models for Partially Observable Robotics Tasks},
- booktitle = {Advances in Neural Information Processing Systems (NeurIPS) Workshop on Instruction Tuning and Instruction Following},
- year = 2023,
- month = dec,
- url = {https://www.merl.com/publications/TR2023-148}
- }
- , "Chance-Constrained Optimization for Contact-rich Systems using Mixed Integer Programming", Nonlinear Analysis: Hybrid Systems, December 2024.
-
Software & Data Downloads
-
Videos
-
MERL Issued Patents
-
Title: "OBJECT MANIPULATION WITH COLLISION AVOIDANCE USING COMPLEMENTARITY CONSTRAINTS"
Inventors: Raghunathan, Arvind U.; Jha, Devesh; Romeres, Diego
Patent No.: 11,883,962
Issue Date: Jan 30, 2024 -
Title: "System and Method for Robotic Assembly Based on Adaptive Compliance"
Inventors: Nikovski, Daniel N.; Romeres, Diego; Jha, Devesh; Yerazunis, William S.
Patent No.: 11,673,264
Issue Date: Jun 13, 2023 -
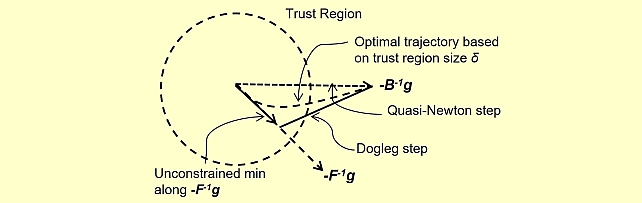
Title: "System and Method for Policy Optimization using Quasi-Newton Trust Region Method"
Inventors: Jha, Devesh; Raghunathan, Arvind U; Romeres, Diego
Patent No.: 11,650,551
Issue Date: May 16, 2023 -
Title: "System and Design of Derivative-free Model Learning for Robotic Systems"
Inventors: Romeres, Diego; Libera, Alberto Dalla; Jha, Devesh; Nikovski, Daniel Nikolaev
Patent No.: 11,389,957
Issue Date: Jul 19, 2022 -
Title: "System and Method for Automatic Error Recovery in Robotic Assembly"
Inventors: Nikovski, Daniel Nikolaev; Jha, Devesh; Romeres, Diego
Patent No.: 11,161,244
Issue Date: Nov 2, 2021 -
Title: "Predictive Classification of Future Operations"
Inventors: Jha, Devesh; Zhang, Wenyu; Laftchiev, Emil; Nikovski, Daniel N.
Patent No.: 10,996,664
Issue Date: May 4, 2021 -
Title: "System and Method for Control Constrained Operation of Machine with Partially Unmodeled Dynamics Using Lipschitz Constant"
Inventors: Chakrabarty, Ankush; Jha, Devesh; Wang, Yebin
Patent No.: 10,895,854
Issue Date: Jan 19, 2021 -
Title: "Vehicle Automated Parking System and Method"
Inventors: Wang, Yebin; Jha, Devesh
Patent No.: 9,969,386
Issue Date: May 15, 2018
-
Title: "OBJECT MANIPULATION WITH COLLISION AVOIDANCE USING COMPLEMENTARITY CONSTRAINTS"