NEWS MERL Researcher Diego Romeres Collaborates with Mitsubishi Electric and University of Padua to Advance Physics-Embedded AI for Predictive Equipment Maintenance
Date released: January 6, 2026
-
NEWS MERL Researcher Diego Romeres Collaborates with Mitsubishi Electric and University of Padua to Advance Physics-Embedded AI for Predictive Equipment Maintenance Date:
December 10, 2025
-
Description:
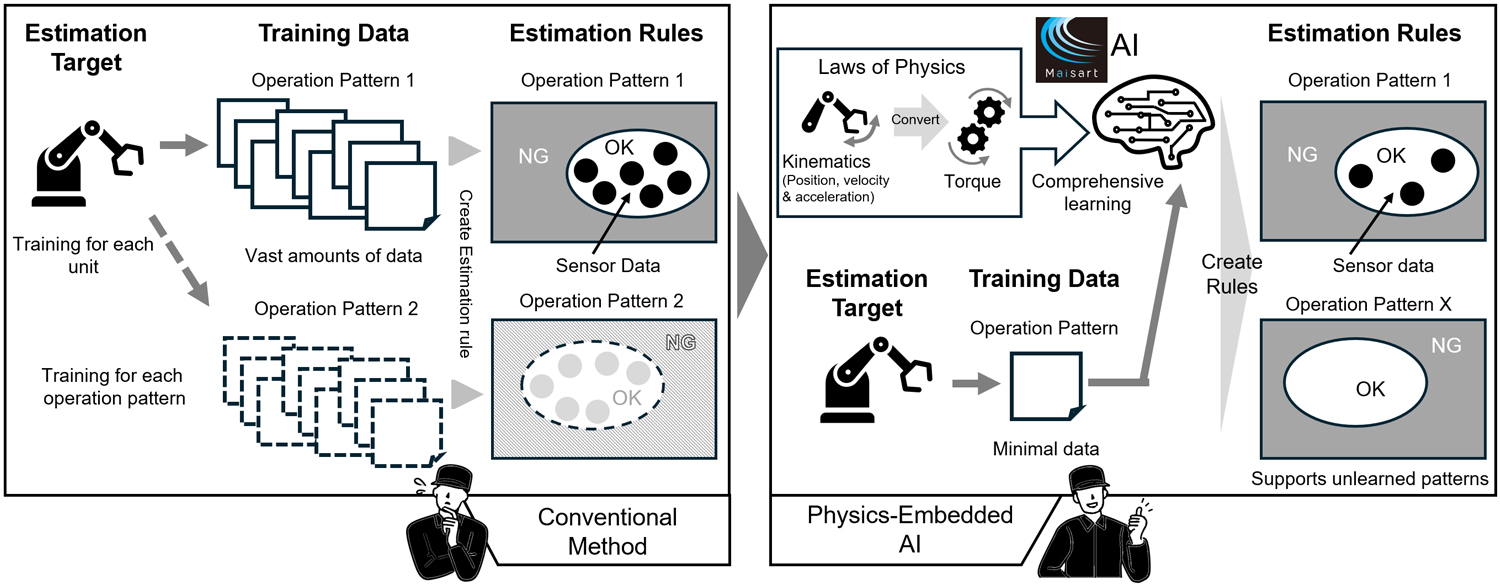
Mitsubishi Electric Research Laboratories (MERL) researchers, together with collaborators at Mitsubishi Electric’s Information Technology R&D Center in Kamakura, Kanagawa Prefecture, Japan, and the Department of Information Engineering at the University of Padua, have developed a cutting-edge physics-embedded AI technology that substantially improves the accuracy of equipment degradation estimation using minimal training data. This collaborative effort has culminated in a press release by Mitsubishi Electric Corporation announcing the new AI technology as part of its Neuro-Physical AI initiative under the Maisart program.
The interdisciplinary team, including MERL Senior Principal Research Scientist and Team Leader Diego Romeres and University of Padua researchers Alberto Dalla Libera and Giulio Giacomuzzo, combined expertise in machine learning, physical modeling, and real-world industrial systems to embed physics-based models directly into AI frameworks. By training AI with theoretical physical laws and real operational data, the resulting system delivers reliable degradation estimates on the torque of robotic arms even with limited datasets. This result addresses key challenges in preventive maintenance for complex manufacturing environments and supports reduced downtime, maintained quality, and lower lifecycle costs.
The successful integration of these foundational research efforts into Mitsubishi Electric’s business-scale AI solutions exemplifies MERL’s commitment to translating fundamental innovation into real-world impact. -
External Link:
-
Research Areas:
-
Related Publications
- , "Audio Signal Processing in the Artificial Intelligence Era: Challenges and Directions", Journal of the Audio Engineering Society, DOI: 10.17743/jaes.2022.0209, Vol. 73, No. 7/8, pp. 406-428, August 2025.
BibTeX TR2025-116 PDF- @article{Steinmetz2025aug,
- author = {Steinmetz, Christian and Uhle, Christian and Everardo, Flavio and Mitcheltree, Christopher and McElveen, J. Keith and Jot, Jean-Marc and Wichern, Gordon},
- title = {{Audio Signal Processing in the Artificial Intelligence Era: Challenges and Directions}},
- journal = {Journal of the Audio Engineering Society},
- year = 2025,
- volume = 73,
- number = {7/8},
- pages = {406--428},
- month = aug,
- doi = {10.17743/jaes.2022.0209},
- url = {https://www.merl.com/publications/TR2025-116}
- }
- , "Lagrangian Inspired Polynomial Estimator for black-box learning and control of underactuated systems", Learning for Dynamics & Control Conference (L4DC), Abate, Alessandro and Cannon, Mark and Margellos, Kostas and Papachristodoulou, Antonis, Eds., July 2024, pp. 1292-1304.
BibTeX TR2024-097 PDF- @inproceedings{Giacomuzzo2024jul,
- author = {Giacomuzzo, Giulio and Cescon, Riccardo and Romeres, Diego and Carli, Ruggero and Dalla Libera, Alberto},
- title = {{Lagrangian Inspired Polynomial Estimator for black-box learning and control of underactuated systems}},
- booktitle = {Learning for Dynamics \& Control Conference (L4DC)},
- year = 2024,
- editor = {Abate, Alessandro and Cannon, Mark and Margellos, Kostas and Papachristodoulou, Antonis},
- pages = {1292--1304},
- month = jul,
- publisher = {PMLR},
- url = {https://www.merl.com/publications/TR2024-097}
- }
- , "A Black-Box Physics-Informed Estimator based on Gaussian Process Regression for Robot Inverse Dynamics Identification", IEEE Transaction on Robotics, DOI: 10.1109/TRO.2024.3474851, pp. 4820-4836, August 2024.
BibTeX TR2024-077 PDF Data Software- @article{Giacomuzzo2024aug2,
- author = {Giacomuzzo, Giulio and Dalla Libera, Alberto and Romeres, Diego and Carli, Ruggero},
- title = {{A Black-Box Physics-Informed Estimator based on Gaussian Process Regression for Robot Inverse Dynamics Identification}},
- journal = {IEEE Transaction on Robotics},
- year = 2024,
- pages = {4820--4836},
- month = aug,
- doi = {10.1109/TRO.2024.3474851},
- issn = {1941-0468},
- url = {https://www.merl.com/publications/TR2024-077}
- }
- , "Physics Informed Gaussian Process Regression Methods for Robot Inverse Dynamics Identification", Conferenza Italiana di Robotica e Macchine Intelligenti, October 2023.
BibTeX TR2023-132 PDF- @inproceedings{Giacomuzzo2023oct2,
- author = {Giacomuzzo, Giulio and Dalla Libera, Alberto and Romeres, Diego and Carli, Ruggero},
- title = {{Physics Informed Gaussian Process Regression Methods for Robot Inverse Dynamics Identification}},
- booktitle = {Conferenza Italiana di Robotica e Macchine Intelligenti},
- year = 2023,
- month = oct,
- url = {https://www.merl.com/publications/TR2023-132}
- }
- , "A Lagrangian Inspired Polynomial Kernel for Robot Dynamics Identification", ICRA 2023 Workshop on Effective Representations, Abstractions, and Priors for Robot Learning (RAP4Robots), May 2023.
BibTeX TR2023-063 PDF- @inproceedings{Giacomuzzo2023may,
- author = {Giacomuzzo, Giulio and Dalla Libera, Alberto and Carli, Ruggero and Romeres, Diego},
- title = {{A Lagrangian Inspired Polynomial Kernel for Robot Dynamics Identification}},
- booktitle = {ICRA 2023 Workshop on Effective Representations, Abstractions, and Priors for Robot Learning (RAP4Robots)},
- year = 2023,
- month = may,
- url = {https://www.merl.com/publications/TR2023-063}
- }
- , "Model-Based Policy Search Using Monte Carlo Gradient Estimation with Real Systems Application", IEEE Transaction on Robotics, DOI: 10.1109/TRO.2022.3184837, Vol. 38, No. 6, pp. 3879-3898, December 2022.
BibTeX TR2022-154 PDF Videos Software- @article{Romeres2022dec,
- author = {Amadio, Fabio and Dalla Libera, Alberto and Antonello, Riccardo and Nikovski, Daniel N. and Carli, Ruggero and Romeres, Diego},
- title = {{Model-Based Policy Search Using Monte Carlo Gradient Estimation with Real Systems Application}},
- journal = {IEEE Transaction on Robotics},
- year = 2022,
- volume = 38,
- number = 6,
- pages = {3879--3898},
- month = dec,
- doi = {10.1109/TRO.2022.3184837},
- issn = {1941-0468},
- url = {https://www.merl.com/publications/TR2022-154}
- }
- , "Audio Signal Processing in the Artificial Intelligence Era: Challenges and Directions", Journal of the Audio Engineering Society, DOI: 10.17743/jaes.2022.0209, Vol. 73, No. 7/8, pp. 406-428, August 2025.
-