TR2011-012
Pose Estimation using Both Points and Lines for Geo-Localization
-
- , "Pose Estimation using Both Points and Lines for Geo-Localization", IEEE International Conference on Robotics and Automation (ICRA), DOI: 10.1109/ICRA.2011.5979781, May 2011, pp. 4716-4723.BibTeX TR2011-012 PDF
- @inproceedings{Ramalingam2011may,
- author = {Ramalingam, S. and Bouaziz, S. and Sturm, P.},
- title = {{Pose Estimation using Both Points and Lines for Geo-Localization}},
- booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
- year = 2011,
- pages = {4716--4723},
- month = may,
- doi = {10.1109/ICRA.2011.5979781},
- url = {https://www.merl.com/publications/TR2011-012}
- }
- , "Pose Estimation using Both Points and Lines for Geo-Localization", IEEE International Conference on Robotics and Automation (ICRA), DOI: 10.1109/ICRA.2011.5979781, May 2011, pp. 4716-4723.
-
Research Areas:
Abstract:
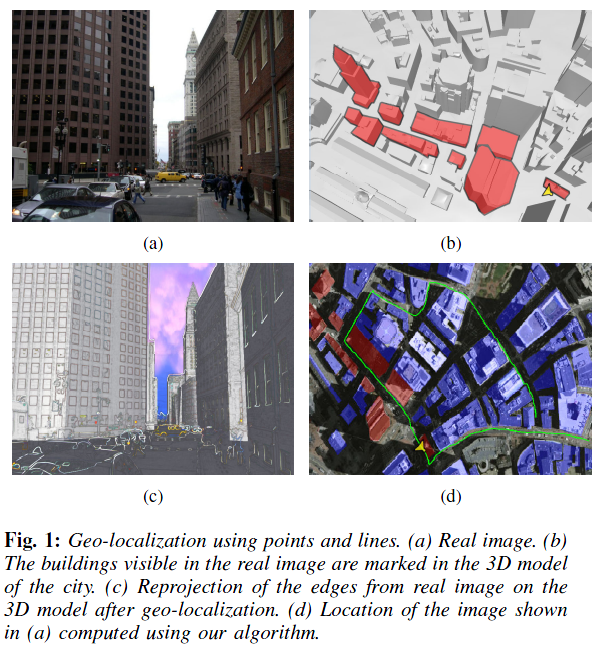
This paper identifies and fills the probably last two missing items in minimal pose estimation algorithms using points and lines. Pose estimation refers to the problem of recovering the pose of a calibrated camera given known features (points or lines) in the world and their projections on the image. There are four minimal configurations using point and line features: 3 points, 2 points and 1 line, 1 point and 2 lines, 3 lines. The first and the last scenarios that depend solely on either points or lines have been studied a few decades earlier. However the mixed scenarios, which are more common in practice, have not been solved yet. In this paper we show that it is indeed possible to develop a general technique that can solve all four scenarios using the same approach and that the solutions involve computing the roots of either a 4th degree or an 8th degree equation. The centerpiece of our method is a simple and generic method that uses collinearity and coplanarity constraints for solving the pose. In addition to validating the performance of these algorithms in simulations, we also show a compelling application for geo-localization using image sequences and coarse (plane-based) 3D models of GPS-challenged urban canyons.
Related News & Events
-
NEWS ICRA 2011: 2 publications by Yuichi Taguchi, Srikumar Ramalingam and C. Oncel Tuzel Date: May 9, 2011
Where: IEEE International Conference on Robotics and Automation (ICRA)
Research Area: Computer VisionBrief- The papers "Pose Estimation using Both Points and Lines for Geo-Localization" by Ramalingam, S., Bouaziz, S. and Sturm, P. and "Finding a Needle in a Specular Haystack" by Shroff, N., Taguchi, Y., Tuzel, O., Veeraraghavan, A., Ramalingam, S. and Okuda, H. were presented at the IEEE International Conference on Robotics and Automation (ICRA).