TR2015-027
A Robust Online Subspace Estimation and Tracking Algorithm
-
- , "A Robust Online Subspace Estimation and Tracking Algorithm", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), DOI: 10.1109/ICASSP.2015.7178735, April 2015, pp. 4065-4069.BibTeX TR2015-027 PDF Software
- @inproceedings{Mansour2015apr1,
- author = {Mansour, H. and Jiang, X.},
- title = {{A Robust Online Subspace Estimation and Tracking Algorithm}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2015,
- pages = {4065--4069},
- month = apr,
- publisher = {IEEE},
- doi = {10.1109/ICASSP.2015.7178735},
- url = {https://www.merl.com/publications/TR2015-027}
- }
- , "A Robust Online Subspace Estimation and Tracking Algorithm", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), DOI: 10.1109/ICASSP.2015.7178735, April 2015, pp. 4065-4069.
-
MERL Contact:
-
Research Area:
Digital Video

Abstract:
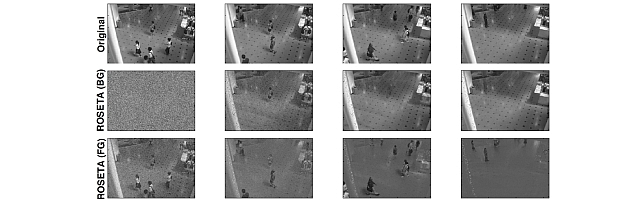
In this paper, we present a robust online subspace estimation and tracking algorithm (ROSETA) that is capable of identifying and tracking a time-varying low dimensional subspace from incomplete measurements and in the presence of sparse outliers. Our algorithm minimizes a robust l1 norm cost function between the observed measurements and their projection onto the estimated subspace. The projection coefficients and sparse outliers are computed using ADMM solver and the subspace estimate is updated using a proximal point iteration with adaptive parameter selection. We demonstrate using simulated experiments and a video background subtraction example that ROSETA succeeds in identifying and tracking low dimensional subspaces using fewer iterations than a state of art algorithm.
Software & Data Downloads
Related News & Events
-
NEWS Multimedia Group researchers presented 8 papers at ICASSP 2015 Date: April 19, 2015 - April 24, 2015
Where: IEEE International Conference on Acoustics, Speech & Signal Processing (ICASSP)
MERL Contacts: Anthony Vetro; Hassan Mansour; Petros T. Boufounos; Jonathan Le RouxBrief- Multimedia Group researchers have presented 8 papers at the recent IEEE International Conference on Acoustics, Speech & Signal Processing, which was held in Brisbane, Australia from April 19-24, 2015.