TR2014-106
Calibration of Non-Overlapping Cameras Using an External SLAM System
-
- , "Calibration of Non-overlapping Cameras Using an External SLAM System", International Conference on 3D Vision (3DV), DOI: 10*1109/eDV.2014.106, December 2014, pp. 509-516.BibTeX TR2014-106 PDF Software
- @inproceedings{Cansizoglu2014dec,
- author = {Ataer-Cansizoglu, E. and Taguchi, Y. and Ramalingam, S. and Miki, Y.},
- title = {{Calibration of Non-overlapping Cameras Using an External SLAM System}},
- booktitle = {International Conference on 3D Vision (3DV)},
- year = 2014,
- pages = {509--516},
- month = dec,
- publisher = {IEEE},
- doi = {10*1109/eDV.2014.106},
- url = {https://www.merl.com/publications/TR2014-106}
- }
- , "Calibration of Non-overlapping Cameras Using an External SLAM System", International Conference on 3D Vision (3DV), DOI: 10*1109/eDV.2014.106, December 2014, pp. 509-516.
-
Research Area:
Abstract:
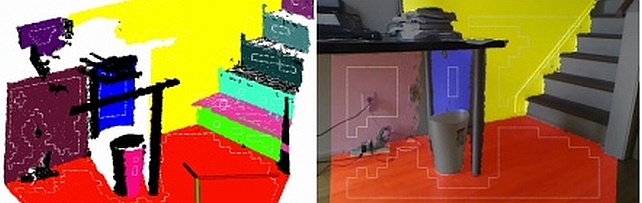
We present a simple method for calibrating a set of cameras that may not have overlapping field of views. We reduce the problem of calibrating the non-overlapping cameras to the problem of localizing the cameras with respect to a global 3D model reconstructed with a simultaneous localization and mapping (SLAM) system. Specifically, we first reconstruct such a global 3D model by using a SLAM system using an RGB-D sensor. We then perform localization and intrinsic parameter estimation for each camera by using 2D-3D correspondences between the camera and the 3D model. Our method locates the cameras within the 3D model, which is useful for visually inspecting camera poses and provides a model-guided browsing interface of the images. We demonstrate the advantages of our method using several indoor scenes.