TR2012-049
Load Positioning in the Presence of Base Vibrations
-
- , "Load Positioning in the Presence of Base Vibrations", American Control Conference (ACC), June 2012, pp. 6282-6287.BibTeX TR2012-049 PDF
- @inproceedings{Shilpiekandula2012jun,
- author = {Shilpiekandula, V. and Bortoff, S.A. and Barnwell, J.C. and {El Rifai}, K.},
- title = {Load Positioning in the Presence of Base Vibrations},
- booktitle = {American Control Conference (ACC)},
- year = 2012,
- pages = {6282--6287},
- month = jun,
- issn = {0743-1619},
- isbn = {978-1-4577-1095-7},
- url = {https://www.merl.com/publications/TR2012-049}
- }
- , "Load Positioning in the Presence of Base Vibrations", American Control Conference (ACC), June 2012, pp. 6282-6287.
-
MERL Contact:
-
Research Area:

Abstract:
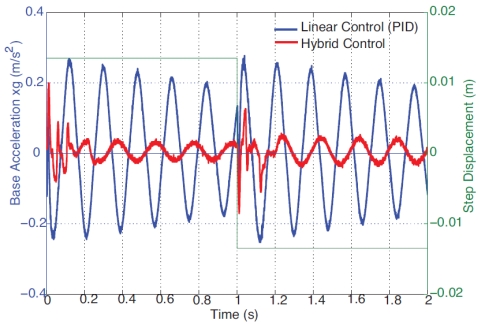
A common problem in factory automation applications is one of lightly damped vibrations of base platforms used for supporting machine tools. Such vibrations arise from the inherent flexibility and low physical damping of the base platforms. Lightly damped base vibrations pose critical challenges in achieving performance specifications such as high tracking bandwidth or low settling times for the machine tools. Any external disturbances from the environment, or the servo torques applied to position the load, may excite the base. In this paper, we propose a switching control design for achieving the dual objectives of base vibration attenuation and fast load positioning. The proposed controller automatically switches between a vibration attenuation controller and a position tracking controller, with the switching implemented based on a state-dependent logic derived from a Lyapunov-based synthesis. The proposed controller is simple in its formulation, tuning, and implementation, and does not require a feedback sensor for measuring the base vibrations. To illustrate its effectiveness, experimental evaluations of the proposed controller and comparisons against a baseline linear controller are presented for a prototype hardware setup consisting of a servomotor-driven positioning stage mounted on a flexible base platform.
Related News & Events
-
NEWS ACC 2012: 2 publications by Scott A. Bortoff, John C. Barnwell III and Stefano Di Cairano Date: June 27, 2012
Where: American Control Conference (ACC)
MERL Contacts: Stefano Di Cairano; Scott A. BortoffBrief- The papers "Further Developments and Applications of Network Reference Governor for Constrained Systems" by Di Cairano, S. and Kolmanovsky, I.V. and "Load Positioning in the Presence of Base Vibrations" by Shilpiekandula, V., Bortoff, S.A., Barnwell, J.C. and El Rifai, K. were presented at the American Control Conference (ACC).