TR2012-048
Further Developments and Applications of Network Reference Governor for Constrained Systems
-
- , "Further Developments and Applications of Network Reference Governor for Constrained Systems", American Control Conference (ACC), June 2012, pp. 3907-3912.BibTeX TR2012-048 PDF
- @inproceedings{DiCairano2012jun,
- author = {{Di Cairano}, S. and Kolmanovsky, I.V.},
- title = {Further Developments and Applications of Network Reference Governor for Constrained Systems},
- booktitle = {American Control Conference (ACC)},
- year = 2012,
- pages = {3907--3912},
- month = jun,
- issn = {0743-1619},
- isbn = {978-1-4577-1095-7},
- url = {https://www.merl.com/publications/TR2012-048}
- }
- , "Further Developments and Applications of Network Reference Governor for Constrained Systems", American Control Conference (ACC), June 2012, pp. 3907-3912.
-
MERL Contact:
-
Research Area:

Abstract:
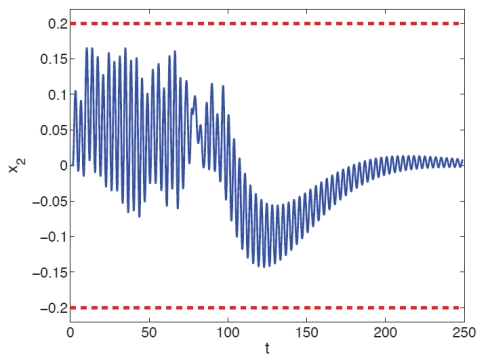
This paper develops further the network reference governor, which is a predictive algorithm for modifying commands sent to the remote system to satisfy state and control constraints. Due to the network communication, the governor must account for a delay that can be time-varying and unknown. The paper summarizes the results on network reference governor theory, and demonstrate its operation on a case study of a attitude control of a spacecraft with a very flexible appendage, where the commands are transmitted remotely over a network to the spacecraft, and hence delayed by a bounded, unknown delay. In this case study, the reference governor ensures that the elastic deflections of the appendage and the control signal satisfy the imposed limits while the spacecraft performs a reorientation maneuver. The paper then presents the novel theoretical construction of a less conservative network reference governor for the case when the delay is long but only slowly time-varying, with known bounds on the rate of change. A spacecraft relative motion control example with constraints on thrust and Line Of Sight (LoS) cone positioning is considered to illustrate these theoretical developments.
Related News & Events
-
NEWS ACC 2012: 2 publications by Scott A. Bortoff, John C. Barnwell III and Stefano Di Cairano Date: June 27, 2012
Where: American Control Conference (ACC)
MERL Contacts: Stefano Di Cairano; Scott A. BortoffBrief- The papers "Further Developments and Applications of Network Reference Governor for Constrained Systems" by Di Cairano, S. and Kolmanovsky, I.V. and "Load Positioning in the Presence of Base Vibrations" by Shilpiekandula, V., Bortoff, S.A., Barnwell, J.C. and El Rifai, K. were presented at the American Control Conference (ACC).